XiaoMi-AI文件搜索系统
World File Search System水面舰艇

高效路径规划和边缘动态避障,确保 USV 安全航行
摘要 — 无人水面舰艇 (USV) 凭借其自主性优势被广泛应用于各个领域,而路径规划是实现自主性的关键技术。然而,单独使用全局路径规划无法避开移动障碍物,而单独使用局部路径规划可能陷入局部极小值而无法到达目标。因此,本文提出了动态目标人工势场 (DTAPF) 方法,以跟随 A* 算法生成的全局路径的动态点作为人工势场 (APF) 的目标点。此外,为了提高传统集中式路径规划方法的 USV 导航响应时间和安全性,我们提出了用于全局路径规划的边缘计算架构和偏移制导方法以避开移动障碍物并符合碰撞规则 (CORLEG)。实验结果表明,采用本文提出的方法,无人艇在存在移动障碍物的环境中能够以较高的概率(约99.4%)到达目标,与传统APF算法相比,在平均路径长度和平均航行时间几乎没有增加的情况下,碰撞概率降低了71%,且计算时延远低于本地计算,也低于云计算。

2022 财年海军 ManTech 项目手册 - 海军研究办公室
ManTech 将继续在为弗吉尼亚级潜艇 (VCS)、哥伦比亚级潜艇 (CLB)、DDG 51 级驱逐舰、CVN 78 级航空母舰、F-35 Lightning II 飞机以及现在的 FFG 62 级护卫舰节省成本方面发挥重要作用,帮助这些平台实现其可负担性目标。 ManTech 的亮点包括优化 F-35 Lightning II 电光瞄准系统的流程,这将为 F-35 Lightning II 项目节省 2.24 亿美元;评估潜艇球阀的陶瓷涂层,这将为 VCS 的总生命周期节省大约 1.254 亿美元,并为 CLB 节省更多成本;促进基于通用商用组件的开放式架构雷达设计,用作模块化构建块,这将为下一代水面搜索雷达节省 4000 万美元;改进造船异型板制造和验证流程,自动将钢材形成复杂的 3D 形状,大大减少在 DDG 51 级驱逐舰以及其他水面舰艇上实施的准备时间和昂贵的下游返工。

加筋板屈曲强度方程的有限元评估
船舶结构中平面内受载加强筋的破坏将导致相邻板材同时屈曲。DMEM10(加拿大军队水面战舰结构设计)和NES 110(英国国防部海军工程标准)评估加筋板的极限强度,即通过在极限板材抗压强度曲线和柱强度曲线之间进行迭代获得极限承载能力。目前,极限板材抗压强度是根据Faulkner有效宽度方程得出的,而加强筋和板材的组合强度则通过Bleich抛物线来评估。抛物线的原始推导仅考虑了材料的非弹性,而没有考虑缺陷。Smith等人根据有限元结果推导出小缺陷、平均缺陷和大缺陷的柱强度曲线集。这些结果以数据表格式呈现在SSCP23(英国国防部水面舰艇结构设计)中。将传统程序的极限强度与 SSCP23 中的设计曲线进行比较,发现存在很大差异。采用有限元分析(包括缺陷和残余应力的影响)来研究这些差异。为了在设计程序中提供替代方案,还研究了土木结构和海上建筑标准中的一些相关规定。
海军部 1998/1999 财年预算估计...
3 0602111N 表面/航空航天测量。 & 武器技术 2 46.015 31.921 32.273 38.833 U 4 0602121N 水面舰艇技术 2 61.717 51.399 46.859 47.353 U 5 0602122N 飞机技术 2 28.672 23.750 23.590 22.860 U 6 0602131M 海军陆战队登陆部队技术 2 16.871 16.374 13.043 14.535 U 7 0602232N C3 技术 2 56.534 54.735 65.566 71.426 U 8 0602233N 战备训练与环境质量技术 2 47.773 47.561 31.762 33.120 U 9 0602234N 材料、电子与计算机技术 2 78.105 84.724 76.653 87.445 U 10 0602270N EW 技术 2 17.133 21.535 22.810 24.707 U 11 0602314N 海底测量& 武器技术 2 52.057 47.967 51.033 57.875 U(机密预算书中提供的 R2/R3 材料) 12 0602315N MCM、采矿与特种作战技术 2 43.553 44.602 42.737 44.575 U 13 0602435N 海洋与大气技术 2 57.260 73.416 48.211 58.037 U 14 0602633N 海底作战武器技术 2 32.021 36.821 35.736 38.304 U(机密预算书中提供的 R2/R3 材料)
2022 财年海军 ManTech 项目手册
ManTech 将继续在为弗吉尼亚级潜艇 (VCS)、哥伦比亚级潜艇 (CLB)、DDG 51 级驱逐舰、CVN 78 级航空母舰、F-35 Lightning II 飞机以及现在的 FFG 62 级护卫舰节省成本方面发挥重要作用,帮助这些平台实现其可负担性目标。 ManTech 的亮点包括优化 F-35 Lightning II 电光瞄准系统的流程,这将为 F-35 Lightning II 项目节省 2.24 亿美元;评估潜艇球阀的陶瓷涂层,这将为 VCS 的总生命周期节省大约 1.254 亿美元,并为 CLB 节省更多成本;促进基于用作模块化构建块的通用商用组件的开放式架构雷达设计,这将为下一代水面搜索雷达节省 4000 万美元;改进造船异型板制造和验证流程,自动将钢材形成复杂的 3D 形状,大大减少在 DDG 51 级驱逐舰以及其他水面舰艇上实施的准备时间和昂贵的下游返工。
人力资源 6395
第214节 人才优化试点计划。第215节 国家安全创新网络的编纂。第216节 修改加强公民教育试点计划。第217节 修改联合人工智能研究、开发和转型活动。第218节 修改国家安全创新活动和制造试点计划。第219节 延长国防部研究、开发、测试和评估中心加强试点计划。第220节 数字数据管理和分析能力。第221节 社会科学、管理科学和信息科学研究活动。第222节 衡量和激励编程能力。第223节 信息技术现代化和安全工作。第224节 联合人工智能中心董事会。第225节 定向能工作组。第 226 节 自主计划执行官。第 227 节 与先进战斗管理系统有关的问责措施。第 228 节 解决外国人才计划的措施。第 229 节 在申请联邦研究奖励时披露外国资金来源。第 230 节 与大型无人水面舰艇和相关进攻性武器系统有关的限制。第 231 节 在审查和报告下一代空中优势能力之前限制资金的可用性。

通过人工智能和物联网迈向智能交通
智慧城市的关键愿景之一是打造更加智能的交通网络,特别是智能交通。它促进人类、动物和货物安全有效的物理移动和互动。典型的全球问题包括可持续能源、交通事故、交通拥堵、物流管理、数据分析、安全和隐私。近年来,物联网 (IoT) 和人工智能 (AI) 在实现这一智慧城市愿景方面发挥了主导作用。前者为可扩展且强大的数据收集和传输提供了坚实的基础设施。后者为智能交通应用的机器带来了创造性和创新性元素。在本期特刊“交通革命中的物联网和人工智能”中,发表了十 (10) 篇研究文章。这些文章围绕人工智能和物联网对智能交通的影响展开了有意义的讨论。本社论不仅总结了专刊文章,还分享了其他热门研究主题。交通运输在当今的经济和社会发展中发挥着至关重要的作用。作为日常道路使用者,我们需要确保安全有效的出行。根据世界卫生组织 (WHO) 的数据,每年道路交通死亡和受伤人数分别达到 135 万和 5000 万 [ 1 ]。根据 Web of Science 统计数据,自 2007 年以来,人们对智能交通的关注度不断提高,这反映在研究出版物数量的不断增加上。从 2014 年到 2019 年,研究出版物数量平均增长了 51.6%。第一篇文章“基于场景划分和深度强化学习的海上自主水面舰艇自主导航决策”[ 2 ],由 X. Zhang、C. Wang、Y. Liu 和 X. Chen 撰写,研究了海上自主水面舰艇 (MASS)。自适应导航和不确定环境引起了人们的关注。提出了一种人工势场深度强化学习方法。他们的实验表明,与传统的深度强化学习方法相比,所提出的方法将碰撞率从 2.24% 显着降低到 1.16%。Y. Jiang、B. Liu、Z. Wang 和 X. Yi 发表了一篇文章“从头开始:一种基于众包的数据融合方法,用于支持位置感知应用”[ 3 ]。26 名志愿者参与了数据收集过程。多维众包结合多分辨率环境地图和交易编码已应用于室内定位问题。总共从两层楼的五种智能手机收集了 931 条众包数据轨迹,总建筑面积为 4000 平方米。结果显示,一半的数据点是完美的,而 90% 的数据点有两个单元格的偏差。
009-36 FY-24 NAVSEA 标准项目 FY-24 项目编号
NAVSEA 标准项目 FY-24 项目编号:009-36 日期:2022 年 10 月 25 日 类别:II 1. 范围:1.1 标题:控制器;维修 2. 参考:2.1 标准项目 2.2 设备技术手册 2.3 S9086-KC-STM-010/CH-300,电力装置 - 通用 2.4 MIL-STD-2003,水面舰艇和潜艇电力装置安装标准方法 2.5 MIL-STD-1310,船上接地、接地和其他电磁兼容性、电磁脉冲 (EMP) 缓解和安全技术 3. 要求:3.1 机械断开并移除每个控制器。3.1.1 标记、识别并保留与设备相关的垫片和其他配件。 3.2 检查每个基础是否有裂缝、变形区域和超过结构每个构件厚度 25% 的损坏。记录结果。3.3 3.1 中拆除的设备基础的清洁和涂漆必须符合 NAVSEA 标准项目(见注释 4.2)。3.4 拆卸每个控制器并清洁组件,使其无异物。3.5 检查每个控制器外壳、安装板、电气和机械组件、内部接线和硬件是否符合 2.2 和控制器接线图,并确定任何缺失和有缺陷的组件和接线。记录结果。记录并保留电气连接数据。
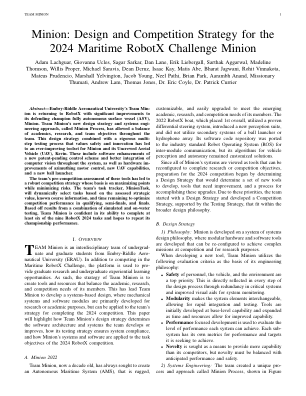
Minion:2024 年海事 RobotX 挑战赛 Minion 的设计和竞赛策略
摘要 — 安柏瑞德航空大学的 Minion 团队将重返 RobotX,对其卫冕冠军全自动水面舰艇 (ASV) Minion 进行重大改进。Minion 团队的新设计策略和系统工程方法称为 Minion Process,实现了整个团队在学术、研究和团队目标之间的平衡。这种设计策略与重视安全和创新的严格多步骤测试流程相结合,为 Minion 及其无人驾驶飞行器 (UAV) Kevin 带来了不断改进的工具集。这些包括对正在申请专利的新控制方案的软件增强和整个系统的计算机视觉更好地集成,以及对方位电机控制、新无人机功能和新球发射器的硬件改进。该团队对这些工具的赛前评估产生了一个强有力的竞争策略,其基础是最大化分数同时最小化风险。该团队的任务跟踪器 MinionTask 将根据评估的战略价值、已知的路线信息和剩余时间动态选择任务,以优化资格赛、半决赛和决赛中的比赛表现。根据模拟和水上测试的结果,Minion 队有信心完成九项 RobotX 2024 任务中的至少六项,并希望重复其冠军表现。
空中力量的蜕变
地缘战略环境的变化促使中国必须改变战略方针。美国国家安全战略已将中国确定为美国的主要战略竞争对手,尤其是在俄罗斯灾难性地入侵乌克兰之后,这场入侵彻底粉碎了人们对中国常规军队战斗力的假设。过去三十年来,中国领导层一直看到美国利用一种非常成功的作战概念在地区冲突中投射力量——陆基和舰载战斗机控制空中,空运和海运部署地面部队,战斗机和轰炸机配合地面部队从空中发动攻击。中国人民解放军 (PLA) 采取了一系列反介入/区域拒止能力作为回应,旨在破坏这种做法。中国正在部署越来越多的弹道导弹和巡航导弹,结合中型轰炸机和海军战机,打击美国和盟军的前沿机场、航空母舰和水面舰艇。此外,中国正在部署先进的防空系统以防御美国空中力量,并部署配备远程导弹的先进战斗机来攻击我们的加油机和情报飞机。这些能力组合有可能削弱美国在西太平洋的力量投射能力和威慑力。