XiaoMi-AI文件搜索系统
World File Search System测量范围
智能材料的性能 - 虹膜-ROMA TRE
摘要:随着生物医学技术的进步,智能材料的引入将变得越来越相关。智能材料对外部刺激(例如,化学,电气,机械或磁信号)或环境环境(例如温度,照明,酸度或湿度)有所反应,并提供多种生物学过程是智能材料和生物学系统之间许多类似物的原因。使用不同的感应原理和制造技术开发了基于此类材料的几种应用。在生物医学领域,力传感器用于表征组织和细胞,作为开发智能手术器械的反馈,以进行微创手术。在这方面,目前的工作概述了有关涉及智能材料的生物医学应用实力测量方法的最新科学文献。尤其是,根据其结果和应用,对文献中提出的主要方法的性能评估进行了审查,重点是其计量特征,例如测量范围,线性性和测量精度。基于智能材料的力量测量方法的分类是根据其潜在应用提出的,突出了优势和缺点。

隧道和地下作品的手册;第2卷
总站用于隧道施工和监测,以测量在安装初步/临时和最终衬里之前和之后构造期间和之后的隧道表面的移动。它们也可以与挤出测量以及测量隧道入口处的运动一起使用。总站的手动测量应根据地球测量的标准程序以及使用专用软件进行数据减少来执行专业技术。要进行测量,应将总站以规定的测量频率,在合适的三级或柱子上放置,以构建以实现设备的安全可重复的位置。参考点将是要固定在隧道墙或临时或最终衬里的棱镜或目标。棱镜和目标是在5或7的阵列中安装的:在隧道冠,侧面和倒置。应保护它们免受建筑活动以及灰尘和水的影响。总站提供了距离 - 通过光学编码器的红外射线和角度测量的距离 - 相对于地理参考站的棱镜/目标。典型的测量范围是:
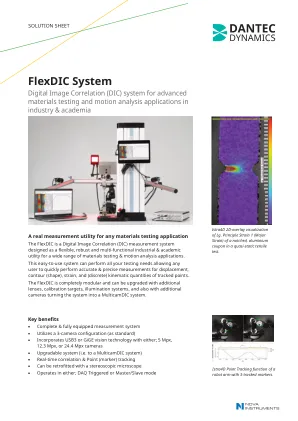
flexdic系统
测量原理一个随机模式被应用于测试对象的表面。该图案可以用白色的基颜色喷洒,并在顶部撒上黑色。用两个高速传感器观察到表面。首先测量轮廓,然后使用特定模式匹配算法鉴定随机结构的每个捕获的图像同源点。每个对象点的三维位置由软件执行的三角剖分确定。如果在对象的位移过程中记录了图像序列,则自动计算每个对象点的变形。动态测量范围系统独特地结合了全场光学测量和高节奏分辨率的高空间分辨。动态范围从静态到超过20.000 Hz,其能力从µm范围到几个10 cm的位移。分辨率对应于视场的10-5,例如用于A4纸尺寸测量区域的几µm。菌株范围从100 µScrains不等到数百分之100%。

传感器 - 语义学者
摘要:本文提出了一种稳健、准确的飞机姿态估计方法。飞机姿态反映了飞机的飞行状态,准确的姿态测量在许多航空航天应用中都非常重要。本工作旨在建立一个基于通用几何结构特征的飞机姿态估计通用框架。该方法提取线特征来描述单幅图像中的飞机结构,并利用通用几何特征形成线组以进行飞机结构识别。利用平行线聚类来检测机身参考线,飞机的双侧对称特性为弱透视投影下机翼边缘线的提取提供了重要约束。在识别飞机主要结构后,采用平面相交法根据建立的线对应关系获得三维姿态参数。我们提出的方法可以增加双目视觉传感器的测量范围,并且具有不依赖于三维模型、合作标记或其他特征数据集的优势。实验结果表明,我们的方法可以获得不同类型飞机的可靠和准确的姿态信息。

2024影响报告
继续在鲜为人知的地区开发旅行:2025年,我们将在Kootenay落基山脉地区介绍新的夏季和冬季旅行。在BC旅游创新实验室,Kootenay落基山脉旅游和目的地的支持下,我们设计了所谓的“落基山脉雨林到落基山脉”旅游走廊的独特路线,目的是鼓励旅行者与温哥华和班夫之间的人们和荒野更加深入地联系。致力于碳中立性:我们将继续测量范围1和2以及范围3来源,分析我们可以减少排放的地方,然后抵消其余部分。为旅行者介绍碳抵消工具:我们旨在为旅行者提供一种简单的方式,以计算和抵消其从飞行和汽车往返目的地以及在自动驾驶旅行中旅行中的碳排放。扩展和改善教育资源和编程:我们将继续与当地的专家和知识管理员合作,以建立我们的教育内容的质量和广度 - 包括旅行者资源,指南培训和旅游编程以及博客故事。

适用于航空航天应用的 MEMS 压力传感器
现代飞机(军用和民用市场)上的压力传感器范围非常广泛且复杂。许多飞机系统都需要压力传感器作为控制元件,例如:发动机(油压、压缩机压力、电子发动机控制);燃料(泵压力、燃油调节);液压系统(制动系统、负载控制)和环境应用(空调、增压)。未来的飞机系统将对压力传感器的重量、尺寸、成本、可靠性和信号处理提出更高的要求 [11。微机械压力传感器对航空航天应用具有吸引力,因为它们旨在在单个芯片中构建小尺寸、轻重量、低成本和最先进的信号处理电子单元。体微机械压力传感器是最早由硅微机械加工制成的产品之一 [2]。这些第一代 MEMS 压力传感器是在 1970 年代开发的。如今,许多公司制造和销售用于汽车、工业和生物医学应用的体微机械压力传感器。这些压力传感器的测量范围可高达 10,000 Psi,并且具有出色的可靠性。例如,Foxboro 公司报告称,他们的压力传感器可以承受 50 亿次 0 至 10,000 Psi 的压力循环。由于这些体微机械压力传感器已经研究多年,因此在制造和设计两个领域的知识都非常丰富 [3-71。

磁通门矢量磁强计:用于地面、无人机和机载磁测的多传感器设备
简介 磁法有多种应用,例如采矿勘探、未爆炸弹药 (UXO) 探测和考古学 (Nabighian 等人,2005)。概念始终相同:测量由于地面磁化不均匀性而导致的磁场横向变化。根据勘测目的,测量范围很广,从地面几平方米到高海拔的平方公里。通常,磁数据是使用标量磁强计利用光泵或质子进动原理获得的。它们给出场的总磁强度 (TMI) 的伪绝对值。但是,这种技术有一些局限性。基于进动(质子和 Overhauser)的磁强计坚固耐用且非常简单。它们的灵敏度约为 0.1 纳特斯拉 (nT),但采样率不能超过几赫兹,这对于高速测量或测量更高频率的时间变化可能会有问题。基于光泵浦的磁强计具有高灵敏度,通常低于 0.01 nT。采集率高达几十分之一赫兹,但它们比进动类型更复杂且更脆弱。无论如何,测量的 TMI 包括设备本身的磁效应,这对精确测量来说是一个问题。磁化设备越大,它应该安装在离磁强计越远的地方。因此,紧凑型设备的设计十分困难。我们通过使用磁通门矢量磁力仪克服了这些限制。
Bruno Gavazzi、Pauline Le Maire、Marc Munschy、Aline Dechamp。磁通门矢量磁力仪:用于地面、无人机和机载磁测的多传感器设备。Leading Edge,2016,35 (9),第 795-797 页。 10.1190/tle35090795.1。hal-01624847
简介 磁法有多种应用,例如采矿勘探、未爆炸弹药 (UXO) 探测和考古学 (Nabighian 等人,2005)。概念始终相同:测量由于地面磁化不均匀性而导致的磁场横向变化。根据勘测目的,测量范围很广,从地面几平方米到高海拔的平方公里。通常,磁数据是使用光泵或质子进动原理的标量磁强计获得的。它们给出场的总磁强度 (TMI) 的伪绝对值。但是,这种技术有一些局限性。基于进动(质子和 Overhauser)的磁强计坚固耐用且非常简单。它们的灵敏度约为 0.1 纳特斯拉 (nT),但采样率不能超过几赫兹,这对于高速测量或测量更高频率的时间变化可能会有问题。基于光泵浦的磁强计具有高灵敏度,通常低于 0.01 nT。采集率高达几十分之一赫兹,但它们比进动类型更复杂且更脆弱。无论如何,测量的 TMI 包括设备本身的磁效应,这对精确测量来说是一个问题。磁化设备越大,它应该安装在离磁强计越远的地方。因此,紧凑型设备的设计十分困难。我们通过使用磁通门矢量磁力仪克服了这些限制。
使用磁石墨烯涂层的锥形锥形光纤传感器
摘要 - 在这项工作中,我们开发了一种便携式光纤传感器,其特征在于其对电磁干扰(EMI)的稳健免疫力(EMI),卓越灵敏度和对磁场的实时监测功能。该传感器在测量增加和减少磁场时表现出显着的准确性和稳定性。为了提高传感器的性能,我们使用组合制造系统(CMS)设计,模拟和制造了锥形直径为40 µm的锥形纤维结构。此外,我们采用了一种称为磁石墨烯(MGO)的2-D材料来固定锥形光纤传感器的传感区域。该传感器背后的关键原理在于经历磁场时MGO的折射率(RI)变化,从而导致传输光谱的波长移动。通过严格的实验,我们彻底评估了传感器在检测增加和减少磁场时的测量范围,灵敏度和准确性。因此,我们确定光纤磁场传感器的灵敏度为0.9和1.6 pm/mt,用于增加5-600 mt的宽测量范围内的磁场。该传感器在各种应用中都有很大的希望,包括医疗测试和科学测量,这是由于其出色的精度,紧凑的大小和无创测量能力。此外,其稳定性和非接触式测量特征将其定位为可控核融合,太空探索和地球物理研究的有价值工具。

即时数字高度读数而无需按下一个按钮
模型Sonaris高度杆类型的声纳技术具有三角剖分程序(真正无触摸的数字精度)测量范围1至9 ft/30至275厘米高度单位/英寸/英寸,英寸,英寸,厘米和毫米的精度ft/In in and In:0.2毕业时; CM:0.5 cm毕业; MM:5毫米毕业表演0.75英寸(19毫米)高,七个段LCD带有蓝色背光按钮电源和单元按钮类型机械开关类型电源要求6“ AA”细胞碱,NI-CAD或NIMH电池(不包括)国内模型:100至240V AC 50/60HZ 12V DC DC 1A ACS ACS ACSA列表: 6800-1045(不包括)国际型号:100至240V AC 12V DC 1A多针输入输入AC功率适配器:检测零件号6800-1047(不包括)总体尺寸5.9在D x 3.5中,在H / 149 mm W x 89 mm w x 89 mm d x 1,203 mm h / d x x x 47.4 In in d x 47.4中在D / 1,270毫米L X 457毫米W x 203毫米D运输重8磅 / 3.6千克UPC代码809161204506美国原产国< / div