XiaoMi-AI文件搜索系统
World File Search System深吸
深脑和皮质刺激
胰岛素输送在根据美国食品药品监督管理局(FDA)(FDA)使用时,标有适应症,禁忌症,警告和预防措施时,在某些情况下证明了外部连续皮下胰岛素输注泵的外部连续皮下胰岛素输注泵。有关医疗必要性临床覆盖标准,请参阅Interqual®CP:耐用的医疗设备,连续的葡萄糖监测器,胰岛素泵和自动化的胰岛素输送技术。单击此处查看标准标准。外部连续皮下胰岛素输注泵对于管理糖尿病患者的其他原因是需要强化胰岛素治疗的原因(每天至少3次胰岛素治疗)。示例包括但不限于胰腺手术后与囊性纤维化相关糖尿病,移植后糖尿病或糖尿病。由于没有足够的疗效证据,以下设备对于管理患有糖尿病的个体而不是医学上的设备:•可植入的胰岛素泵•不可编程的经透皮胰岛素输送系统(例如,V-go)连续葡萄糖持续葡萄糖监测(CGM)短期cgm(3-14天)的短期cgm(3-14天)的供应范围(3-14天)供应量。治理糖尿病患者所需的医学上所需的。

人工智能(AI)相关技术趋势分析(深度学习的定位)
与人工智能相关的专利分布在广泛的技术领域,但我们发现它们集中在某些专利分类中。因此,使用 JP-NET 的“专利地图 -> 专利分类制表”功能,按照专利分类和关键词对已识别的出版物进行制表,并在每个级别(类/子类/主组/子组/部署符号/卷号)进行制表,以识别分布不均匀的区域。

利用深度学习设计和分析人工智能密码系统
[12] A. Siarohin、S. Lathuiliere、E. Sangineto 和 N. Sebe,“使用可变形 GAN 生成外观和姿势条件人体图像”,IEEE 模式分析机器智能汇刊,第 43 卷,第 4 期,第 1156-1171 页,2021 年 4 月。[13] L. Zhou、J. Chen、Y. Zhang、C. Su 和 MA James,“智能对称密钥加密的安全性分析和新模型”,计算机安全,第 80 卷,第 14-24 页,2019 年 1 月。[14] M. Coutinho、R. de Oliveira Albuquerque、F. Borges、LG Villalba 和 T.-H. Kim,“学习
爬墙机器人:优化吸附和新型抽吸技术
摘要。本文回顾了爬壁机器人的进展,重点介绍了吸附优化和新型吸力技术。爬壁机器人因其在危险作业中的潜力以及在不影响机动性的情况下在各种墙面上导航的能力而引起了广泛关注。其中一项创新包括专为光滑墙面设计的机器人,集成了真空吸附系统和粘合带。这种设计增强了机器人的灵活性和可操纵性,并深入分析了其用于攀爬任务的附着机制。已经推导出稳定攀爬所需的吸附力和电机扭矩等关键参数,机器人的原型展示了在不同墙面上的高稳定性和适应性。另一项关键研究深入研究了吸入室中吸入压力的建模和实验分析,强调了不同室轮廓的作用。在腔室底部引入了一种底部限制器的新添加,并使用 3D 建模和计算流体动力学分析了其设计和性能。限制器对机器人粘附效率的影响已通过实验评估,在非抹灰砖墙上显示出良好的效果。通过这些研究,本文强调了爬墙机器人在不同应用中的不断发展和潜力。
4088 青少年吸电子烟危害小册子 v4.indd
p 尼古丁是一种高度成瘾的化学物质,可以很快导致依赖。一旦上瘾,就很难戒掉,长期使用尼古丁会对您的身体产生持久的影响。p 当您试图停止时,您可能会感到焦虑、烦躁,并且有强烈的渴望。p 尼古丁会改变大脑化学反应,使注意力、学习和控制冲动变得更加困难。p 电子烟中的味道和尼古丁一样容易上瘾,因此很难停止使用电子烟。

从头开始洞察二氧化碳,H2O和N2吸附在bn- ...
这项研究利用密度功能理论(DFT)来探索BN掺杂的准四膜堆积(QTP)C 60 C6 60聚合物纳米片的结构稳定性,电子特性,吸附行为,光学特征和氢进化反应(HER)活性。吸附研究表明,与BN掺杂相比,与CO 2和N 2相比,H 2 O分子的亲和力明显更高,强调了湿度在调节气体感应响应中的关键作用。这与对新型非金属2D接口对水相互作用的有限原子规模的了解有限。Bader电荷传输分析和吸附能量计算进一步验证了H 2 O(+0.056 E)的增强吸附,从而诱导了0.5至1.2 eV的显着带隙修改。光学研究表明,可见光谱中的光吸收得到了改善,这表明了材料的光电和光催化应用的潜力。她的活性评估表明,BN掺杂降低了氢进化的过电势,从而提高了催化效率。总体而言,BN掺杂的QTP C 60纳米片具有较高的气体选择性,提高光学特性和改善的催化性能,使它们成为温室气体捕获,湿度感应和可持续能源应用的有希望的候选者。
分子“邮政编码”将杀手T细胞吸引到脑肿瘤
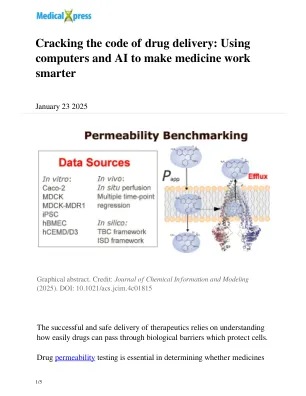
在计算机上(在计算机中):科学家使用计算机程序来预测药物如何根据其化学特性在体内移动。在实验室(体外):他们在菜肴中的细胞上测试药物,以查看其在受控环境中的表现。在人类/动物中(体内):有时,它们在活体中测试该药物以查看其工作原理。
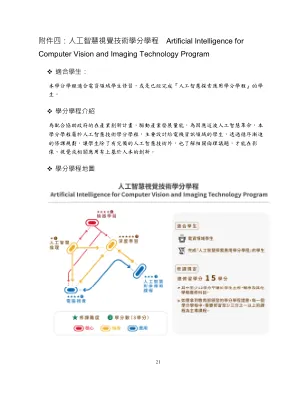
附件四:人工智慧视觉技术学分学程...
课名课名课名建议修课顺序可用下列课程替代建议修课顺序机器学习建议修课顺序建议修课顺序建议修课顺序可用下列课程替代建议修课顺序1或2机器学习特论3人工智慧伦理、法律与社会1或2人工智慧伦理与人权1或2人工智慧伦理与人权33或4深度学习实验3或4深度学习实验3或4深度学习实验3或4深度学习实验3或4深度学习实验3或4影像处理概论3或4影像处理概论影像处理概论影像处理概论影像处理概论影像处理概论影像处理概论影像处理概论数位影像处理数位影像处理数位影像处理数位影像处理数位影像处理影像处理、电脑视觉及深度学习概论学习概论学习概论学习概论学习概论学习概论学习概论影像处理与机器人视觉影像处理与机器人视觉影像处理与机器人视觉影像处理与机器人视觉影像处理与机器人视觉计算机视觉理论电脑视觉实务与深度学习计算机视觉理论电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉与深度学习电脑视觉与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉与深度学习电脑视觉与深度学习电脑视觉与深度学习电脑视觉与深度学习电脑视觉与深度学习电脑视觉与深度学习电脑视觉与深度学习高等电脑视觉高等电脑视觉电脑视觉与深度学习电脑视觉与深度学习3 3 3 3 3 3或4或4或4或4或4或4或5智慧医疗

阐明细胞外蛋白的功能,这是藻类吸收的关键
作者:Daisuke Shimamura,Tomoaki Ikeuchi,Ami Matsuda,Yoshinori Tsuji,Hideya Fukuzawa,Keiichi