XiaoMi-AI文件搜索系统
World File Search System滑滑

EST1. ML1 和 EST2 中规定的货物的望远镜瞄准器...
军用物品清单 2004年5月1日生效 ML1 口径小于20毫米的滑膛武器、口径为12.7毫米(口径0.50英寸)或更小的其他武器和自动武器及其配件,以及为其专门设计的部件: a.步枪、卡宾枪、左轮手枪、手枪、冲锋枪和机关枪:注ML1.a.不管制以下物品: 1.1938年以前制造的火枪、步枪和卡宾枪; 2.1890年以前制造的火枪、步枪和卡宾枪的复制品; 3.1890 年以前制造的左轮手枪、手枪和机关枪及其复制品; b. 以下滑膛武器: 1.专门设计用于军事用途的滑膛武器; 2.以下其他滑膛武器: a.全自动型; b.半自动或泵动型; c. 使用无壳弹药的武器; d. ML1.a.、ML1.b. 或 ML1.c. 所控武器的消音器、特殊枪架、弹夹、武器瞄准器和消焰器。注 1:ML1 不管制用于狩猎或体育目的的滑膛武器。这些武器不得专门设计用于军事用途或全自动射击类型。注 2 ML1 不管制专门设计用于假弹药且不能发射任何管制弹药的枪支。注 3 ML1 不管制使用非中心发火弹壳弹药且非全自动射击类型的武器。EST1。ML1 和 EST2 中规定的商品的望远镜瞄准器,但 ML5 条目中规定的商品除外。EST2。滑膛武器,但 ML1b 或 ML2 条目中规定的商品除外,以及专门为其设计的部件。注。EST2 不涵盖以下物品: 1. 口径不超过 4.5 毫米的气动武器; 2. 信号手枪。EST3。弹药筒和其他弹药,以及专为 EST2 条目中指定的武器设计的部件。注意。EST3 不涵盖以下物品: 1. 专为气枪设计的铅或铅合金弹丸弹药; 2. 假弹药。ML2 口径为 20 毫米或以上的滑膛武器,口径大于 12.7 毫米(口径 0.50 英寸)的其他武器或装备,投影仪和配件,如下,以及为其专门设计的部件: a.枪支、榴弹炮、加农炮、迫击炮、反坦克武器、射弹发射器、军用火焰喷射器、无后坐力炮及其信号减弱装置;

滑行道上滑行的飞机与等待点第二架静止的飞机相撞
2012 年 9 月,美国调查机构国家运输安全委员会 (NTSB) 根据 1993 年至 2012 年间调查的 12 起事故,向 FAA 和 EASA (21) 发出了两项安全建议 (20)。一架大型飞机的翼尖在滑行道上滑行时与另一架飞机或物体相撞。 NTSB 建议为所有大型飞机以及从驾驶舱不易看到翼尖的飞机安装摄像系统等防撞辅助设备,以帮助飞行员在滑行时确定翼尖路径。

基于超扭转分数阶滑模控制的最优模型预测调节直流微电网直流侧电压
摘要:本文旨在从本质上调节电力系统扰动条件下直流微电网的直流母线电压。因此,提出了一种新型最优模型预测超扭转分数阶滑模控制 (OMP-STFOSMC),用于三相交流-直流转换器,可有效提高微电网的稳定性和动态性能。传统的模型预测控制器严重影响动态稳定性,导致过冲、下冲和稳定时间过长。可以用滑模控制器代替这些传统控制器,以适当解决此问题。传统滑模控制器的主要缺点是控制信号中的高频抖动,这会影响系统,并且使其在实际应用中不令人满意且不可行。所提出的 OMP-STFOSMC 可以有效提高控制跟踪性能并减少高频抖动问题。随机分形搜索 (SFS) 算法因其高探索性和良好的局部最优规避能力而被用于最佳地调整控制器参数。考虑不同的运行条件来评估所提出的控制器的动态和无抖动性能。通过比较分析的仿真结果,可以观察到所提出的OMP-STFOSMC具有更好的动态稳定性特性。关键词:直流微电网,跟踪性能,抖动问题,OMP-STFOSMC,SFS算法
用于测量列车风洞设置的数值研究...
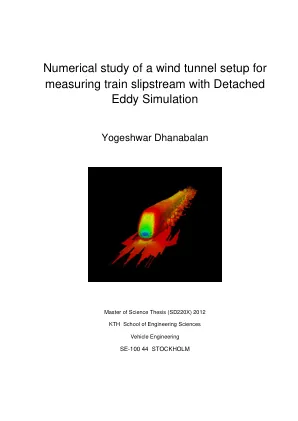
高速列车已成为世界各地交通运输系统不可或缺的一部分。随着速度的提高,列车周围区域会产生非常高的速度,称为滑流。过去几十年来,人们进行了实验研究来研究这些现象的影响。滑流速度是使用放置在轨道上行驶的真实列车和在移动模型装置和旋转轨道装置等装置上运行的模型列车附近的风速计测量的。但是,大多数这些研究的成本都相当高。本论文的目的是找到一种测量滑流的替代方法。分离涡模拟用于模拟 ETR500 高速列车 1:15 比例模型周围的流动,其配置不同,类似于在轨道和风洞中进行的测试。将模拟结果与在都灵-诺瓦拉高速线上进行的实验测试获得的数据进行了比较。还进行了风洞测试以验证 CFD 数据。从结果得出结论,可以使用在列车前方设置滑动地板的风洞装置来确定列车产生的滑流速度是否在 TSI 标准规定的限值内。
用于测量列车风洞装置的数值研究...
高速列车已成为世界各地交通运输系统不可或缺的一部分。随着速度的提高,列车周围区域会产生非常高的速度,称为滑流。过去几十年来,人们进行了实验研究来研究这些现象的影响。滑流速度是使用放置在轨道上行驶的真实列车和在移动模型装置和旋转轨道装置等装置上运行的模型列车附近的风速计测量的。但是,大多数这些研究的成本都相当高。本论文的目的是找到一种测量滑流的替代方法。分离涡模拟用于模拟 ETR500 高速列车 1:15 比例模型周围的流动,其配置不同,类似于在轨道和风洞中进行的测试。将模拟结果与在都灵-诺瓦拉高速线上进行的实验测试获得的数据进行了比较。还进行了风洞测试以验证 CFD 数据。从结果得出结论,可以使用在列车前方设置滑动地板的风洞装置来确定列车产生的滑流速度是否在 TSI 标准规定的限值内。

超级扭曲算法 Djihad Matouk - ijicic
摘要。目前,无人机型四轴飞行器的跟踪控制是研究人员的热点。为了解决这个控制问题,根据期望的目标选择合适的控制器是一个基本问题。尽管存在有害的抖动现象,滑模控制 (SMC) 仍表现出可接受的性能。本文通过二阶滑模控制 (2-SMC) 实现四轴飞行器的轨迹跟踪控制。它是保留传统 SMC 优势同时避免不良抖动效应的替代解决方案之一。具体而言,采用超扭转算法,该算法是对 2-SMC 的改进,无需任何滑动变量导数。为了确保稳定性并增强四轴飞行器的跟踪轨迹,设计了一种基于超扭转算法的全局块控制。所提出的技术具有很高的稳定性,因为它允许为每个位置和姿态状态推导适当的控制律。仿真结果证明了该方法在稳定性和跟踪控制方面的有效性。与经典SMC和2型模糊逻辑控制器进行了比较研究,以阐明所提出的2-SMC的有效性。关键词:四轴飞行器无人机,全轨迹跟踪,非线性控制,二阶滑模控制,超扭转算法

用于灵活飞机轨迹跟踪和负载减轻的非线性增量控制
本文提出了一种用于柔性飞机同时进行轨迹跟踪和负载减轻的非线性控制架构。通过利用控制冗余,可以在不降低刚体指令跟踪性能的情况下减轻阵风和机动负载。所提出的控制架构包含四个级联控制环路:位置控制、飞行路径控制、姿态控制和最优多目标机翼控制。由于位置运动学不受模型不确定性的影响,因此采用非线性动态逆控制。相反,飞行路径动力学受到模型不确定性和大气扰动的干扰;因此采用增量滑模控制。基于 Lyapunov 的分析表明,该方法可以同时降低传统滑模控制方法的模型依赖性和最小可能增益。此外,姿态动力学为严格反馈形式;因此采用增量反步滑模控制。此外,还设计了一种新型负载参考生成器,用于区分执行机动所需的负载和过载负载。负载参考由内环最优机翼控制器实现,而过载负载由襟翼自然化,而不会影响外环跟踪性能。通过空间轨迹跟踪任务和阵风负载缓解任务验证了所提出的控制架构的优点
通过设计第三种方法实现四轴飞行器的轨迹跟踪控制...
[1] L. Derafa、L. Fridman、A. Benallegue 和 A. Ouldali,“四旋翼直升机姿态跟踪问题的超扭转控制算法”,载于《可变结构系统 (VSS)》,2010 年第 11 届国际研讨会,2010 年,第 62-67 页。[在线]。可访问:http://ieeexplore.ieee.org /stamp/stamp.jsp?arnumber=5544726 [2] A. Rabhi、M. Chadli 和 C. Pegard,“四旋翼飞行器的鲁棒模糊控制稳定”,载于《先进机器人技术 (ICAR)》,2011 年第 15 届国际会议,2011 年,第471-475 页。[在线]。可访问:http://ieeexplore .ieee.org =6088629 / stamp/ stamp。JSP?ar 编号 [3] H. Khebbache、B. Sait、F. Yacef 和 Y. Soukkou,“在执行器故障情况下对四旋翼飞行器进行稳健稳定”,《国际信息技术、控制和自动化杂志》,第 2 卷,第 2 期。2,2012 年,第 1-13 页。[4] P. Johan From、J. Tommy Gravdahl、K. Ytterstad Pettersen,《车辆操纵器系统》,Verlag,伦敦:Springler,2014 年。[5] Atheer L. Salih、M. Moghavvemi、Haider A. F. Mohamed、Khalaf Sallom Gaeid,《四旋翼无人机的建模和 PID 控制器设计》,IEEE,2010 年。[6] D. Lee、H. Jin Kim 和 S. Sastry,“四旋翼直升机的反馈线性化与自适应滑模控制”,《国际控制自动化与系统杂志》,第 3 卷,第 1 期。7,页。页。419-428,2009 年。[7] O. Gherouat、D. Matouk、A. Hassam 和 F. Abdessemed,“四旋翼无人机的建模和滑模控制”,J.自动化与系统工程,卷。10,号。3,页。150-157,2016 年。[8] Abraham Villanueva、B. Castillo-Toledo 和 Eduardo Bayro-Corrochano,“四旋翼多模式飞行滑模控制系统”,2015 年国际无人机系统会议 (ICUAS),美国科罗拉多州丹佛市,2015 年 6 月。[9] 易奎、顾锋、杨丽英、何玉清、韩建达,“四旋翼吊挂系统滑模控制”,第 36 届中国控制会议论文集,中国大连,2017 年 7 月 26-28 日。[10] A. Benallegue、A. Mokhtari 和 L. Fridman, “四旋翼无人机的反馈线性化和高阶滑模观测器”,《VariableStructure Systems》,2006 年。VSS’06。国际研讨会,2006 年,第365–372。5887–[在线]。可访问:http://ieee xplore.ieee.org/stamp/stamp.jsp?arnumber=1644545 [11] T. Madani 和 A. Benallegue,“四旋翼无人机的滑模观测器和反步控制”,美国控制会议,2007 年。ACC ’07,2007 年,第