XiaoMi-AI文件搜索系统
World File Search System滚动
滚动广告编号 IITD/2023/AP-1
12. 人文与社会科学:经济学:微观经济学、宏观经济学、国际贸易和公共财政。语言学:语义学、音系学、形态学、句法学、语言习得、计算语言学、心理语言学、神经语言学。哲学:哲学的所有分支学科,特别关注以下领域:伦理学、形而上学、哲学史、政治哲学、法哲学、逻辑学、认识论、心灵哲学、环境哲学、女性主义哲学、文化哲学、宗教哲学、技术哲学和科学哲学。特别欢迎能够接触非英语语言哲学文本的哲学家申请,他们属于世界不同地区的不同哲学传统。心理学:社会心理学、积极心理学、认知心理学、神经心理学、计算心理学。其他专业的优秀候选人也可申请。

无限滚动的影响探索负面影响...... - LibraETD
无限滚动对人类大脑和日常生活产生了深远的影响。在几乎所有的社交媒体中,我们这些消费者,即人,已经从客户转变为产品。公司使用和出售我们的数据,因此他们有明显的金钱动机来让我们沉浸其中。虽然让技术接管我们的生活让公司赚了很多钱,但它也对我们人类产生了非常负面的影响。我将致力于展示无限滚动的负面影响,并寻找可能的解决方案以及为什么似乎没有解决方案。我的论文中的主要互动者将是消费者、设计师、公司和政府。我将主要评估公司在对消费者产生负面影响方面面临的道德和道德挑战,以及政府在限制公司损害消费者方面面临的道德和道德挑战。
通过滚动曲线在大规模点云中的全局本地化...
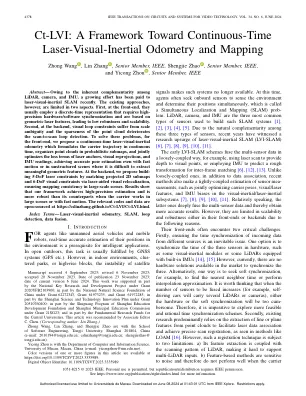
摘要 - 由于LiDar,Camera和IMU之间的固有互补性,最近对激光 - 视觉惯性大满贯付出了越来越多的努力。但是,现有方法在两个方面受到限制。首先,在前端,它们通常采用离散的时间表示,需要高精度硬件/软件同步,并基于几何激光功能,从而导致稳健性和可扩展性低。第二,在后端,视觉循环限制遭受了规模的歧义和点云的稀疏性,扫描到扫描环的检测恶化。To solve these problems, for the front-end, we propose a continuous-time laser-visual-inertial odometry which formulates the carrier trajectory in continuous time, organizes point clouds in probabilistic submaps, and jointly optimizes the loss terms of laser anchors, visual reprojections, and IMU readings, achieving accurate pose estimation even with fast motion or in unstructured scenes where it is difficult to extract meaningful几何特征。在后端,我们通过通过激光辅助视觉重新定位匹配预计的2D子包和6-DOF视觉约束来建立5-DOF激光限制,从而确保在大型场景中映射一致性。结果表明,我们的框架实现了高精度的估计,并且比载体在大型场景或快速移动时工作时更健壮。相关的代码和数据在https://cslinzhang.github.io/ct-lvi/ct-lvi/ct-lvi.html上进行开源。
多伦多滨水区滚动五年战略计划 2022/...
附近的 Quayside 和 Parliament Slip 也在继续建设中,这两个项目都将支持持续的经济振兴。在董事会于 2021 年批准从 PortsToronto 购买 Parliament Slip 后,公司开始推进规划和设计工作。该滑道将通过建造室外游泳池、增强型 WaveDeck、餐厅、食品摊位和全年使用的设施来解决该地区缺乏社会基础设施的问题——所有这些都将形成一个活跃、可访问的公共空间集群。与此同时,与 Quayside 项目的首选支持者的开发协议谈判预计将于 2022-2023 年初完成。这两项举措将共同开启海滨振兴的激动人心的新篇章:在东部海滨的中心地带打造一个充满活力的新社区,并在水边打造一个新的目的地,包括与各种海洋用途的连接。

硼添加对滚动接触疲劳的影响...
摘要 烧结材料由于工艺简单而具有生产率优势,但由于强度不足而不适用于高负荷齿轮。为了提高烧结材料的疲劳强度,作者开发了无需二次加工即可实现高密度的液相烧结技术。在本研究中,评估了硼添加量(0-0.4 mass%)对 Fe-Ni-Mo-BC 烧结渗碳材料滚动接触疲劳强度的影响。此外,为了仅评估硼添加效果而不考虑密度的影响,控制每个试样的烧结密度相同。在本研究的测试范围内,硼添加量为 0.1 mass% 的材料滚动接触疲劳极限(p max )lim 表现出最高值,超过了 1700 MPa。该值不仅明显高于无硼材料的(p max )lim(1100 MPa),而且与锻钢的(p max )lim(1900 MPa)相比也是极高的值。从孔隙结构和材料结构两个角度研究了0.1B辊的(p max )lim明显较高的原因。孔隙结构方面,无硼辊的孔隙形状为不规则形状,而0.1B辊的孔隙形状为球形。通过对滚动接触疲劳试验中辊内部的正交剪切应力进行CAE分析的结果发现,0.1B辊孔隙周围的正交剪切应力的最大值比无硼辊低约35 %。该结果表明,0.1B辊比无硼辊更不容易出现裂纹。即,认为0.1B材料的孔隙形状对滚动接触疲劳强度的提高有影响。
滚动否集:01 Kendriya Vidyalaya Sangathan,...
类:X sub:英语和文学(代码编号184)允许的时间:最大3小时:80一般说明:非常仔细,严格地遵循它们:1。本试卷包括11个问题。所有问题都是强制性的。2。回答文件包含三个部分 - a:阅读技能部分-B:语法和创意写作技巧部分-C:文学教科书3。尝试根据每个部分的特定说明进行问题A-阅读技能(20分)1。阅读以下文本。10 1。虽然对土地,海洋和空气的污染进行了彻底的记录,但一种更新且不认可的污染形式是噪音的上升潮流,这会影响城市和农村地区。这个增长的问题对环境,公共卫生和生产力有长期影响,尤其是在像印度这样的快速发展的国家中。2。与其他形式的污染不同,噪音是看不见的,并且常常被忽视,被视为轻微烦恼。但是,数据表明噪声污染构成了严重威胁,从而引起各种并发症。在某些行业中,降低的工人生产力已直接与恒定接触高噪声水平有关。3。全印度医学科学研究所对噪声对健康的影响的开创性调查表明,噪声会破坏身体和心理功能。它与恶心,呕吐,疼痛,高血压和心血管问题等症状有关。4。5。钦奈基础医学研究生院的一项研究支持了这些发现。发现,在研究的一半行业中,暴露于较高噪音水平的工人变得更加易怒,脾气暴躁和不耐烦,通常会导致生产动荡和破坏。这是在四个大都市周围的主要工业区观察到的。另一个有关方面的另一个是娱乐噪音,在城镇中,它变得越来越普遍。扬声器在婚礼,节日和音乐节目等活动期间经常全面使用,尤其是在晚上,对他人几乎没有考虑。即使是50分贝的声音水平也可以使某人从深度睡眠中唤醒。实验表明,产生60到80分贝的声音的扬声器会导致一个人的学生扩张并增加氧气摄入量,从而导致pal症。这些影响在狭窄的街道上更加强烈。此外,电视机在主要观看时间内通常会大量播放,令人不安的邻居。发出噪音已成为地位象征,无论是在选举活动,口号宣传,甚至炫耀拥有电视的象征。

机器人18轮的机器人在麦迪逊县滚动
- 新闻发布政策 - •麦迪逊尼亚工作人员将全面考虑所有新闻稿,但最终保留确定是否发布发行版的权力。•内容必须是事实和客观。•内容不得包含广告语言(例如“谢谢”,“恭喜”,“立即呼叫”,“购买门票”,“现在显示”)或包括定价。•一般业务兴趣的项目适合广告 - 请参阅广告政策和当前利率。•内容不得贬低竞争的公司或组织。•内容只能提交和发布一次。•不能保证将发布新闻稿。•麦迪逊主义者可以编辑语法和内容的提交。•麦迪逊主义保留相对于上述政策做出所有决定的权利。
最佳滚动体验视为网页。 2024年5月
世界卫生组织(WHO)于5月20日宣布,它将美国食品药品监督管理局命名为WHO列出的机构(WLA),可以依靠,以履行最高水平的监管标准和实践,以实现质量,安全性和疗效,该质量,安全性和疗效是由WHO所确定的。在转到WLA方法后,WHO在2022年3月取代了“严格监管机构”的旧名称,该方法为寻求证明其以高级,全球认可的绩效水平运作的监管机构提供了一种透明的,基于证据的途径。FDA在新名称系统中的参与和协作支持了这一范式及其通过提供针对共同指标的监管计划的方法来进一步的国际监管协调和依赖的能力。

智能滚动器辅助设备:当前趋势和挑战
摘要 - 运动损失对自主权有重大影响。智能滚动器已被提出,以增强传统设备不够的能力。在过去十年中,已经提出了许多人类机器人相互作用系统。比较分析表明,除了机械问题外,它们在I)配备的传感器和执行器中的主要不同; ii)输入接口; iii)操作模式和iv)适应功能。本文在过去6年中介绍了方法的审查和暂定分类法。总共审查了92篇论文。我们丢弃了不关注人类机器人相互作用的作品,也只专注于机械适应。在审查和分类之后提供了批判性分析,突出了与目标人群测试的系统。
滚动广告编号 IITD/2021/PROF-2(针对教职员工...
RFMEMS、成像和监视、RF数字协同设计、有源和可重构天线和阵列、大功率固态系统、非线性建模和测量、高达 THz 的组件和系统;微电子学:MEMS 和微系统、国防和空间应用的微传感器开发、毫米波和 THZ 电子设备、量子信息技术的量子电子设备;信号处理:声学信号处理、水下和空气声学、语音和音频处理、通信信号处理、传感器阵列信号处理、多传感器数据融合、信号处理的机器学习、物联网信号处理;多学科:现代雷达系统。18. 大气科学 (CAS):大气和海洋科学的所有领域。19. 汽车研究与摩擦学 (CART):电动汽车电力电子