XiaoMi-AI文件搜索系统
World File Search System灵巧的
最终报告 - 机器人技术公司
美国国防部 (DOD) 正在开展多项作战机器人开发项目,但这些项目侧重于开发轮式或履带式车辆平台,而非人形机器人。但人工制品世界是由人类为人类设计的,例如工具、建筑物和车辆。人形机器人拥有双足、灵巧的手臂和手以及足够的智能,可以在那个世界中顺利运行:在建筑物内移动、爬楼梯或梯子、用门把手而不是力量开门、使用现有工具、操作现有机器、驾驶现有车辆以及发射现有武器。在自然环境中,军用轮式车辆可以在地球表面约 30% 的面积上行驶,军用履带式车辆可以在约 50% 的面积上行驶。有腿的生物和机器(包括双足人形机器人)几乎可以在整个陆地表面行走。此外,人类与看起来像人类的机器人互动最容易。虽然许多国家都在致力于开发人形机器人,但日本公司在开发人形机器人方面投入的精力最多。虽然这些机器人具有先进的感知和控制功能,可以实现自主效应器运动(例如行走),但它们在与环境的自主交互方面却受到限制。由于美国在自主智能控制方面更先进(尽管是针对车辆),因此一个有趣的项目是整合美国控制系统

Robodexvlm:视觉语言模型模型的任务计划和灵活机器人操纵的运动控制
摘要 - 本文介绍了Robodexvlm,这是一个用于机器人任务计划的创新框架,并掌握了配备灵敏手的协作操纵器的检测。以前的方法着眼于简化且有限的操纵任务,这些任务通常忽略了以长期培训方式抓住各种对象相关的复杂性。相比之下,我们提出的框架利用灵巧的手能够抓住不同形状和大小的对象,同时根据自然语言命令执行任务。所提出的方法具有以下核心组件:首先,设计了一个具有任务级恢复机制的稳健任务计划器,该机制设计了视觉语言模型(VLMS),这使系统能够解释和执行长序列任务。第二,基于机器人运动学和正式方法提出了语言引导的灵活掌握感知算法,该方法是针对带有多种物体和命令的零摄像的灵巧操作量身定制的。全面的实验结果验证了Robodexvlm在处理长层场景和执行灵巧抓握方面的有效性,适应性和鲁棒性。这些结果突出了该框架在复杂环境中运行的能力,展示了其进行开放式灵巧操作的潜力。我们的开源项目页面可以在https://henryhcliu.github.io/robodexvlm上找到。

sparsedff:稀疏视图特征蒸馏
人类表现出非常出色的技能,可以在不同形状,姿势和外观的对象中传递操纵能力,这是一种植根于他们对不同实例之间语义对应关系的理解的能力。为了为机器人提供类似的高级理解,我们提出了Sparsedff,这是一种新颖的DFF,用于3D场景,利用大型2D视觉模型从稀疏的RGBD图像中提取语义特征,该域与固定设置的许多任务相关,尽管它与许多任务相关。sparsedff生成视图一致的3D DFF s,通过将图像特征映射到3D点云,从而有效地对灵活性操作进行了有效的灵感操作学习。Sparsedff的中心是一个特征改进网络,通过视图和特征连续性的点式缩写机制之间的对比损失进行了优化。这有助于最小化特征差异W.R.T.最终效应参数,桥接演示和目标操作。在现实世界中用灵巧的手验证,Sparsedff证明有效地有效地操纵刚性和可变形的对象,表明对象和场景变化之间具有显着的概括能力。

机器人和使能技术中的仿生分布式能源
机器人技术的进步紧跟功能材料、传感、驱动和通信技术以及人工智能等领域的发展,这些技术共同使得机器人能够高度模仿生物系统的形态和功能。 [6] 例如,大面积触觉皮肤或电子皮肤 (e-skin) 的实现使得机器人能够像动物一样利用来自全身的触觉反馈在非结构化或杂乱的环境中工作。 [5,7] 同样,微型但功能强大的执行器和电子元件使得灵巧的手和敏捷机器人得以开发。 [8] 近年来,3D/4D 打印也为开发具有复杂形状和软结构的敏感机器人开辟了道路。 [9,10] 因此,机器人技术的进步紧跟电子硬件、先进材料和制造等其他领域的技术进步。然而,有一个关键领域,机器人技术似乎在很大程度上没有跟上技术趋势,即为机器人供电所需的能源。可靠的能源对于自主机器人的平稳运行至关重要,特别是在主电源不易获得的环境中。事实上,当今大多数应用都要求机器人具有自主性,因此,它们必须完全依靠电池作为电源。分析最新技术,我们注意到,尽管电池技术取得了重大进展,但在机器人采用先进能源解决方案方面并没有取得太大进展。[11]
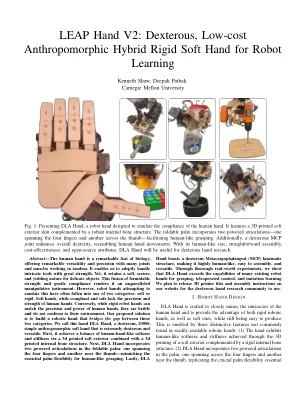
Leap Hand V2:灵巧,低成本的拟人化杂交刚性刚性软手,用于机器人学习
摘要 - 人类的手是生物学的非凡壮举,具有许多关节和肌肉的同时,具有出色的多功能性和精度。它使我们能够以极大的力量处理复杂的工具。然而,它保留了柔软,安全且屈服于精致物体的性质。强大的强度和柔和的合规性融合使其成为无与伦比的操纵仪器。但是,试图模拟这一点的机器人之手通常属于两个类别之一:软或刚性。柔软的手,虽然符合性和安全性缺乏人类手的精度和力量。相反,虽然刚性机器人的手可以与人体的精确性和力量相匹配,但它们是脆弱的,不符合其环境。我们提出的解决方案是建立一个机器人手,弥合这两个类别之间的差距。我们称此手DLA手,一种灵巧的,$ 3000,简单的拟人化软手,非常灵巧且多才多艺。首先,它通过3D打印的软外部与3D打印的内部骨结构相结合,达到了人体手状的柔软度和刚度的平衡。接下来,DLA手在可折叠的棕榈中结合了两个动力的表达:一个横跨四个手指,另一只手指靠近拇指,模仿了类似人类的握把的基本棕榈灵活性。最后,DLA

POCO:来自异质机器人学习的政策组成
摘要 - 从异质数据中培训一般的机器人策略,用于不同任务是一个重大挑战。现有的机器人数据集以不同的方式(例如颜色,深度,触觉和本体感受信息)而有所不同,并在不同领域(例如模拟,真实的机器人和人类视频)中收集。当前方法通常从一个域收集和汇集所有数据,以训练单个策略以处理任务和域中的异质性,这非常昂贵且困难。在这项工作中,我们提出了一种灵活的方法,即称为政策组成,以通过构成用扩散模型代表的不同数据分布来结合学习场景级别和任务级的广义操纵技巧的信息,以学习场景级别和任务级别的广义操纵技能。我们的方法可以使用任务级组成进行多任务操作,并与分析成本函数组成,以在推理时间调整策略行为。我们将我们的方法培训有关模拟,人类和真实机器人数据,并在工具使用任务中进行评估。组成的策略在不同的场景和任务中实现了鲁棒和灵巧的性能,并且超过了单个数据源的基准,并在模拟和现实世界实验中汇总非常异构数据的简单基线。

我有一个梦想:AAAI 主席演讲,1985 年 8 月 19 日
二十五年前,我做了一个梦,可以说是一个白日梦。你们很多人都有这个梦。我梦见一种特殊的计算机,除了“大脑”之外,它还有眼睛、耳朵、手臂和腿。我做梦也没有想到这个新的计算机朋友会成为我或我的雇主赚钱的手段,或者帮助我的国家——尽管我当时爱我的国家,现在仍然爱,而且我也不反对赚钱。我甚至没有梦见用这台奇妙的新机器来帮助世界上的穷人和残疾人这样的有价值的事业。不,我的梦想充满了看到一台机器像人一样行动的狂野兴奋,至少在许多方面是这样。我希望它能读出纸上的印刷字符和手写脚本。我可以看到它!或者它的一部分:在一个可以戴在我眼镜上的小相机里,附上一个耳塞,当我在街上遇到我的朋友和熟人时,它会悄悄地把他们的名字传到我的耳里。或者通过电话,我可以和德国的朋友交谈,他用德语,我用英语。你看,我的计算机朋友有能力识别人脸、合成语音、理解口语句子、翻译语言等等。我承认,1960 年我的计算机人的脑袋比我现在想象的要大得多。因为那时我还不知道微型计算机。我梦中的计算机人喜欢走路和打乒乓球,尤其是和我一起。我喜欢教它东西——因为它可以学习灵巧的技能和心理概念。还有更多。当我从白日梦中醒来时,我发现我们没有这些东西,但我们确实有一些了不起的计算机,即使在那时,所以我当时就决定放弃

通过对人皮层的图案微刺激的触觉边缘和运动
11 Shirley Ryan能力实验室,伊利诺伊州芝加哥。¥对应:vallegiacomo@gmail.com†体感皮质的同等贡献的心理内微刺激(ICMS)会唤起触觉感觉,可以通过改变电极和刺激参数1-3来系统地操纵其位置和特性。这种现象可用于从脑控制的仿生手传达有关对象相互作用的反馈。但是,ICMS当前提供了艰巨的触摸感,限制了灵巧的对象操纵和对神经假体系统的有意识体验。利用我们对S1 4,5中这些感官特征如何编码的理解,我们试图扩展基于ICMS的人工触摸的曲目,以提供有关瘫痪者中对象的局部几何形状和运动的信息。首先,我们通过多个空间图案的电极同时传递了ICM,采用了对齐投影场(PFS)的特定布置。未提及的参与者报告了边缘的感觉。接下来,我们创建了更复杂的PFS,发现参与者可以直观地感知任意触觉形状和皮肤压痕模式。通过依次通过具有空间不连续的PF的电极传递图案化的ICM,我们甚至可以唤起整个皮肤的运动感觉,即我们能够系统地操纵的方向和速度。我们得出的结论是,受我们对S1中触觉编码的理解启发的ICM的适当时空图案可以引起复杂的感觉。我们的发现有助于推动人造触摸的界限,从而丰富了参与者的有意识的感觉体验,从简单的人造知觉到模仿自然触摸的高度信息的感觉。

可编程机器人“转印和喷射”打印,适用于大型...
摘要 大型 3D 曲面电子产品是微电子行业的一种趋势,因为它们具有与复杂表面共存的独特能力,同时保留了 2D 平面集成电路技术的电子功能。然而,这些曲面电子产品对制造工艺提出了巨大挑战。在这里,我们提出了一种可重构、无掩模、保形制造策略,采用类似机器人的系统,称为机器人化“转移和喷射”打印,以在复杂表面上组装各种电子设备。这种新方法是一项突破性的进步,具有在复杂表面上集成刚性芯片、柔性电子产品和保形电路的独特能力。至关重要的是,包括转移印刷、喷墨打印和等离子处理在内的每个过程都是无掩模、数字化和可编程的。机器人化技术,包括测量、表面重建和定位以及路径编程,突破了 2D 平面微加工在几何形状和尺寸方面的根本限制。转移打印首先用激光从供体基板上剥离刚性芯片或柔性电子元件,然后通过灵巧的机器人手掌将其转移到曲面上。然后,机器人电流体动力打印直接在曲面上书写亚微米结构。它们的排列组合实现了多功能保形微加工。最后,利用机器人混合打印成功地在球形表面上制造了保形加热器和天线,在有翼模型上制造了柔性智能传感皮肤,其中组装了曲面电路、柔性电容和压电传感器阵列以及刚性数模转换芯片。机器人混合打印是一种创新的打印技术,可实现 3D 曲面电子产品的增材、非接触和数字化微加工。

开发具有新型刚度检测和阻抗控制
摘要:触觉手和握手,旨在实现熟练的对象操纵,对于与环境的高精度互动至关重要。这些技术在诸如微创手术等领域尤其重要,它们可以增强手术精度和触觉反馈:在高级假肢的发展中,为用户提供了改善功能和更自然的触觉,并且在工业自动化和制造业内,它们为更有效,安全和灵活的生产过程贡献了更有效,安全和灵活的生产过程。本文介绍了两指机器人手的开发,该手的开发采用了简单而精确的策略来操纵物体而不会损害或丢弃它们。我们的创新方法融合了对力敏感的电阻器(FSR)传感器,其平均电流是伺服电机的平均电流,以提高抓握的速度和准确性。因此,我们旨在创建一种比抓手更灵巧的抓握机制,而不是机器人手。为了实现这一目标,我们设计了一只两指机器人手,每只手指上都有两个自由度。将FSR集成到每个指尖中,以实现对象分类和初始接触的检测。随后,连续监测伺服电流以实现阻抗控制并保持对物体的掌握在各种刚度中。在初始接触时提出的手部对象的刚度分类,并通过融合FSR和运动电流来施加准确的力。使用耶鲁-CMU – Berkeley(YCB)对象进行了实验测试,包括一个泡沫球,一个空的苏打罐,苹果,苹果,玻璃杯,塑料杯和一个小牛奶包装。机器人的手成功地从桌子上捡起了这些物体,并将它们坐下而不会造成任何损坏或中途丢弃。我们的结果代表着具有先进物体感知和操纵能力的触觉机器人手的重要一步。