机构名称:
¥ 1.0
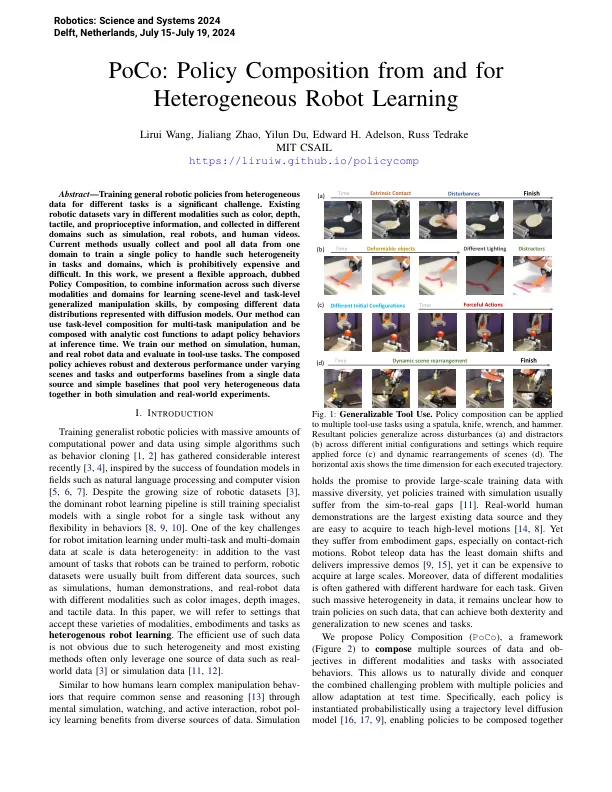
摘要 - 从异质数据中培训一般的机器人策略,用于不同任务是一个重大挑战。现有的机器人数据集以不同的方式(例如颜色,深度,触觉和本体感受信息)而有所不同,并在不同领域(例如模拟,真实的机器人和人类视频)中收集。当前方法通常从一个域收集和汇集所有数据,以训练单个策略以处理任务和域中的异质性,这非常昂贵且困难。在这项工作中,我们提出了一种灵活的方法,即称为政策组成,以通过构成用扩散模型代表的不同数据分布来结合学习场景级别和任务级的广义操纵技巧的信息,以学习场景级别和任务级别的广义操纵技能。我们的方法可以使用任务级组成进行多任务操作,并与分析成本函数组成,以在推理时间调整策略行为。我们将我们的方法培训有关模拟,人类和真实机器人数据,并在工具使用任务中进行评估。组成的策略在不同的场景和任务中实现了鲁棒和灵巧的性能,并且超过了单个数据源的基准,并在模拟和现实世界实验中汇总非常异构数据的简单基线。
POCO:来自异质机器人学习的政策组成
主要关键词


相关文件推荐