机构名称:
¥ 1.0
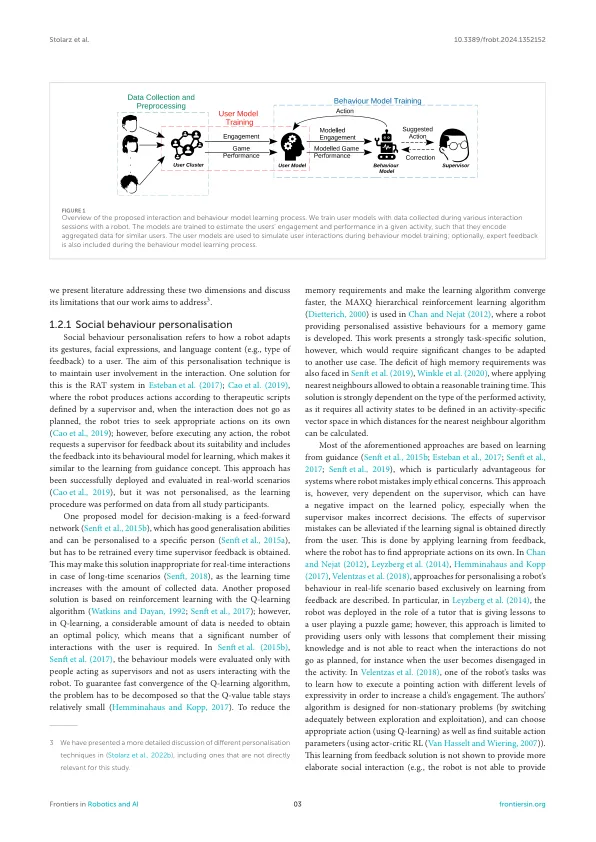
在机器人辅助疗法期间,机器人通常需要由治疗师部分或完全控制,例如使用“向导”方案;这使得治疗课程乏味,因为治疗师无法完全专注于与正在接受治疗的人的互动。在这项工作中,我们开发了一种基于学习的行为模型,该模型可用于增加机器人决策过程的自主权。我们将强化学习作为一种模型培训技术进行了研究,并比较考虑用户参与和活动性能的不同奖励功能。我们还分析了各种策略,旨在使学习过程更加易于处理,即i)具有学识渊博的用户模型的行为模型培训,ii)在用户组之间的策略转移; iii)从专家反馈中学习政策。我们证明,策略转移可以大大加快策略学习过程,尽管奖励功能对机器人可以选择的行动有重要影响。尽管本文的主要重点是个性化管道本身,但我们在一项小规模的现实世界可行性研究中进一步评估了学习的行为模型,在该研究中,六个用户与辅助机器人一起参加了序列学习游戏。这项研究的结果似乎表明,从指导中学习可能会在提高用户的参与度和游戏性能方面产生最适当的政策,但是需要进行大规模的用户研究以验证该观察的有效性。
机器人的机器人行为基于学习的个性化...
主要关键词


相关文件推荐