机构名称:
¥ 2.0
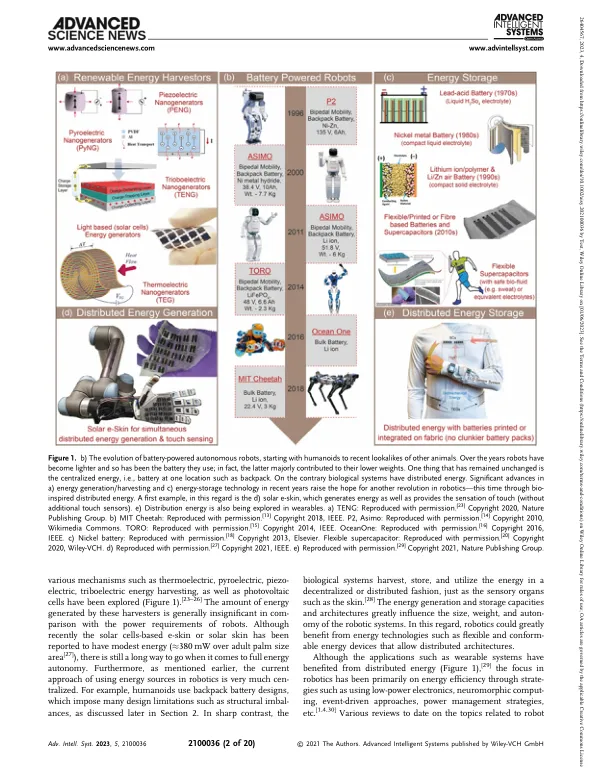
机器人技术的进步紧跟功能材料、传感、驱动和通信技术以及人工智能等领域的发展,这些技术共同使得机器人能够高度模仿生物系统的形态和功能。 [6] 例如,大面积触觉皮肤或电子皮肤 (e-skin) 的实现使得机器人能够像动物一样利用来自全身的触觉反馈在非结构化或杂乱的环境中工作。 [5,7] 同样,微型但功能强大的执行器和电子元件使得灵巧的手和敏捷机器人得以开发。 [8] 近年来,3D/4D 打印也为开发具有复杂形状和软结构的敏感机器人开辟了道路。 [9,10] 因此,机器人技术的进步紧跟电子硬件、先进材料和制造等其他领域的技术进步。然而,有一个关键领域,机器人技术似乎在很大程度上没有跟上技术趋势,即为机器人供电所需的能源。可靠的能源对于自主机器人的平稳运行至关重要,特别是在主电源不易获得的环境中。事实上,当今大多数应用都要求机器人具有自主性,因此,它们必须完全依靠电池作为电源。分析最新技术,我们注意到,尽管电池技术取得了重大进展,但在机器人采用先进能源解决方案方面并没有取得太大进展。[11]
机器人和使能技术中的仿生分布式能源
主要关键词


相关文件推荐