XiaoMi-AI文件搜索系统
World File Search System现代控制

计划“A” 毕业生培训资格...
计算机辅助设计 (续) 本课程符合控制、自动化及仪器仪表 (CAI) 学科计划“A”的资格,但毕业生必须完成下列任何两组选修课: 1) “ELEG 3101 - 医疗仪器及传感器” 2) “MAEG 1010 - 机器人设计导论” 3) “MAEG 3060 - 机器人技术导论” 4) “MAEG 3080 - 机器智能基础” 5) “MAEG 4040 - 机电一体化系统” 6) “MAEG 4050 - 现代控制系统分析与设计” 7) “MAEG 5070 - 非线性控制系统” 8) “MAEG 5090 - 机器人技术专题” 9) “MAEG 5010 / ENGG 5402 - 高级机器人技术” 10) “MAEG 5020 / ENGG 5403 - 线性控制系统专题 /线性系统理论与设计” 11)“MAEG 5050 / ENGG 5404 - MEMS 和纳米机器人 / 微加工和微机电系统”

飞行路径控制系统的设计和仿真...
摘要:了解自动飞行控制系统的知识可以理解控制飞机飞行的基本问题,并提高其评估通常提出的问题解决方案的能力。有许多飞行任务需要让飞机非常精确地遵循某些特别定义的路径。每当要控制传统飞机时,飞行员都可以控制三个轴中的任意一个或所有轴的旋转速度:俯仰、滚转和偏航。在考虑飞行控制处理中的控制时,需要在飞机上测量航向和压力高度等路径变量。这些近似是线性的,也是充分的;这类系统可以被视为飞行路径控制系统类的成员,并在本文中进行了深入讨论。本文以时域方法为基础,介绍了现代控制理论方法,特别是状态方程的使用,这是一种自然有效的技术,与飞机动力学的数学描述相协调,最完整、最方便地用状态和输出方程来表达。本文还涉及 AFCS 的特定模式,涉及在不同飞行条件下为参考飞机 CHARLIE(一种非常大的四引擎喷气式客机)实施的飞行路径控制系统。SIMULINK 用于实现飞行路径控制系统,因为它们对于形成集成 AFCS 的最外层循环非常重要。关键词:飞机动力学、自动飞行控制系统 (AFCS)、飞行路径控制系统 (FPCS)
飞行路径控制系统设计与仿真
1,2 航空电子系,JNTUK 卡基纳达科学技术学院 摘要:深入了解自动飞行控制系统的知识可以理解控制飞机飞行的基本问题,并提高其评估通常提出的问题的解决方案的能力。许多飞行任务都要求飞机非常精确地遵循某些专门定义的路径。每当需要控制一架传统飞机时,飞行员可以指挥三个轴中任意一个或所有轴的旋转速度:俯仰、滚转和偏航。在飞行控制处理中考虑对路径变量的控制时,需要测量飞机的航向和气压高度等路径变量。这些近似值是线性的,也是充分的;这类系统可被视为飞行路径控制系统类的成员,本文对此进行了深入讨论。本文以时域方法为基础,介绍了现代控制理论方法,特别是状态方程的使用,这是一种自然有效的技术,与飞机动力学的数学描述相协调,而飞机动力学可以用状态和输出方程最完整、最方便地表达。本文还涉及 AFCS 的特定模式,涉及在不同飞行条件下为参考飞机 CHARLIE(一种非常大的四引擎喷气式客机)实施的飞行路径控制系统。SIMULINK 用于实施飞行路径控制系统,因为它们对于形成集成 AFCS 的最外层循环非常重要。关键词:飞机动力学、自动飞行控制系统 (AFCS)、飞行路径控制系统 (FPCS)
机器人技术中的联系模型:比较分析
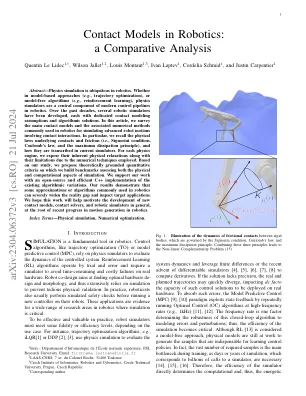
摘要 - 物理模拟在机器人技术中无处不在。在基于模型的方法中是否(例如,轨迹优化)或无模型算法(例如,增强学习),物理模拟器是机器人技术中现代控制管道的核心组成部分。在过去的几十年中,已经开发了几个机器人模拟器,每个模拟器都有专用的接触建模假设和算法解决方案。在本文中,我们调查了主要的接触模型以及在机器人技术中常用的相关数值方法,用于模拟涉及接触相互作用的高级机器人运动。特别是我们回想起接触和摩擦的物理定律(即,Signorini条件,库仑定律和最大耗散原则),以及如何在当前的模拟器中转录它们。对于每种物理引擎,由于使用的数值技术,我们暴露了它们固有的身体放松以及它们的局限性。基于我们的研究,我们提出了理论上基础的定量标准,在该标准上我们构建了评估模拟物理和计算方面的基准。我们通过现有算法变化的开源和有效的C ++实现来支持我们的工作。我们的结果表明,在机器人技术中常用的某些近似值或算法可以严重扩大现实差距并影响目标应用程序。我们希望这项工作将有助于激励新的接触模型,联系求解器和机器人模拟器的开发,这是机器人技术中最新动态进展的根源。

Yuon Control AG 荣获 2025 年 Ypsomed 创新奖
布格多夫,2025 年 1 月 24 日,上午 7 点——昨天晚上,伯尔尼的 EVENTfabrik 为 2025 年 Ypsomed 创新奖的获奖者颁发了荣誉。Yuon Control AG 荣获第一名。Xemperia 和 Santella 也登上了领奖台。创新奖由 Ypsomed 创新基金会第十一次颁发,共向获奖者颁发 100,000 瑞士法郎的奖金。该奖项旨在促进应用科学大学和瑞士中部大学向工业界转移知识和技术。共有 34 个项目参加了此次竞赛。作为评选过程的一部分,由六名专家组成的评审团审查了所有项目文件。评估标准包括创新潜力和原创性、市场实施潜力、技术可行性以及专家对团队、文件和现场演示的总体印象。 “每年,我们创新奖的参赛作品都令人印象深刻,展现了当地初创企业非凡的创造力和创新实力。我们很高兴今年能够重点介绍三个杰出项目。这些研究成果有可能对我们的经济和社会产生持久影响——只要它们能够付诸实践。通过我们的竞赛,我们希望帮助创始人在漫长的旅程中迈出新的一步,并鼓励他们继续前进,”Ypsomed 创新基金总裁 Simon Michel 在约 200 名嘉宾出席的颁奖典礼上说道。 2025 年 Ypsomed 创新奖的获奖者如下: 第一名:Yuon Control AG(伯尔尼应用技术大学) Yuon Control AG 开发用于楼宇自动化和能源管理的高精度技术和系统。该公司专注于现代控制和调节技术,提供基于先进传感器、IoT 1 和软件平台的解决方案。Yuon Control AG 的系统能够无缝集成来自不同来源的数据,从而能够精确分析和优化能源流和建筑功能。该公司依靠开放标准、模块化架构和可扩展技术来确保最大的灵活性和互操作性。亚军:Xemperia(弗里堡大学)Xemperia 是弗里堡大学的一个衍生项目,正在为癌症的早期检测和监测树立新标准,重点是乳腺癌。该公司正在开发将最先进的分子诊断与强大的数据分析和基于人工智能的模式识别相结合的技术。Xemperia 使用精确的生物分子测试和智能算法,可以实现对癌症的早期和可靠诊断和持续监测。其目的是提高诊断准确性并促进个性化的患者护理和治疗方法。