XiaoMi-AI文件搜索系统
World File Search System缝隙

采用玻璃微加工技术研制的 W 波段共馈空心波导缝隙阵列天线
吴亚祥 1,2 ,余田 3 ,张淼 1,2 ,余大全 3 ,广川二郎 4 ,刘庆火 5 1 厦门大学深圳研究院,深圳 518057,中国,miao@xmu.edu.cn* 2 厦门大学电磁学与声学研究所,厦门 361005,中国,miao@xmu.edu.cn* 3 微电子与集成电路系,厦门,中国。 4 东京工业大学电气电子工程系,日本东京。 5 杜克大学电气与计算机工程系,美国达勒姆。 摘要 - 本文提出了一种采用玻璃微加工技术设计的 W 波段 16×16 单元共馈空气填充波导缝隙阵列天线。该天线由五层玻璃晶片层压而成。创新性地采用玻璃通孔(TGV)技术制作各层,该技术通过激光诱导深刻蚀工艺实现,并已初步应用于先进封装领域。根据湿法刻蚀工艺,在玻璃晶圆设计时考虑了10°的锥角。除了对天线进行电磁分析外,还对其力学和热学特性进行了仿真分析,以确保玻璃晶圆键合成功。实验结果表明,在中心频率94 GHz处天线增益为30.3 dBi,在W波段,当天线增益高于30 dBi时,带宽为13.3%。

新型太阳跟踪传感器研制及性能测试
针对光伏发电光电跟踪精度低的问题,提出并设计了一种基于图像识别的新型太阳跟踪传感器。该传感器可直接输出其与太阳的角度偏差,并详细分析了其机械结构和工作原理。采用高精度相机采集投影仪表面两个缝隙的图像,利用Hough变换对光缝图像进行识别,求出两个缝隙的线性方程后,求出交点坐标,实现太阳高度角和方位角的计算。对Hough变换方案进行了改进,利用缝隙的骨架图像代替边缘图像,改进方案经验证可有效提高检测精度。利用标定测试板对传感器进行测试,实验结果表明,该方案可实现方位角和高度角的测量,精度可达0.05°,能够满足光伏发电太阳跟踪及多种光电跟踪实现对检测精度的要求。
电池的网络处理解决方案
结合了数十年的缝隙和工程知识,我们的自动缝制定位系统为您的缝隙需求提供了高度准确,安全和可靠的解决方案。当经常进行多种材料或线路变化时,我们的自动化槽系统很快就可以通过不需要操作员用磁带措施手动重新安置每个刀具,从而减少浪费,同时通过不需要刀具附近的操作员来增加安全性。此外,可以将给定作业的所有缝制参数存储为食谱,从而确保使用更快的设置的稳定结果一致。

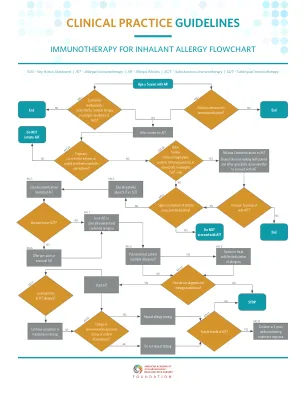
原创文章 无缝护理策略减少纤维支气管镜检查及外科手术患者术前焦虑及术后不良反应
摘要:目的:评价无缝隙护理模式在纤维支气管镜检查(FB)中的应用效果。方法:选取2017年6月1日至2019年5月31日我院呼吸科行FB检查的患者200例作为研究对象,随机分为无缝隙护理(SN)组100例和常规护理(RN)组100例。RN组给予常规护理,SN组在常规护理模式基础上融入无缝隙护理。对比2组患者焦虑自评量表(SAS)评分、血清炎性因子水平、术后不良反应、诺丁汉健康量表(NHP)评分及护理满意度。结果:根据SAS评分系统结果显示,2组患者入院时焦虑程度相似(P>0.05);术前SN组焦虑水平显著低于入院时(P<0.001)及同期RN组(P<0.001);SN组痰中带血、咳嗽、低氧血症、心律失常发生率显著低于RN组(P分别为0.027、0.009、0.037、0.030)。FB前RN组与SN组血清IL-6、IL-17、TNF-α、IL-10水平比较,差异均有统计学意义(P分别为0.006、0.320、0.410、0.025)。无缝隙护理后,SN组体力活动、疼痛、睡眠、情绪反应、精力等NHP评分与RN组比较,差异均有统计学意义(P<0.001)。 SN组患者满意度为91.0%,RN组患者满意度为71.0%,差异有统计学意义(P<0.001)。结论:全程无缝隙护理策略可降低FB术前焦虑水平,减少术后不良事件发生,提高FB术后生活质量和满意度,具有较高的实用价值和推广价值。

可伸缩的微骨系统,用于紫外线,可见和红外光谱
多对象光谱(MOS)是宇宙起源(COR)计划的技术发展优先级。在基于地面的MOS应用(例如,机器人配置的纤维和打孔板)中流行的孔径控制方法是刚性的,对于太空飞行而言是不实用的。微糖阵列(MSA)技术解决了此问题。MSA充当适应性的缝隙面膜。可以对数组进行编程,以提供与天空中稀疏分布的源相对应的任何缝隙。也可以对其进行编程以在扩展源上提供形状的缝隙。这种NGMSA SAT的开发重点介绍了当前宇宙起源计划优先事项的技术进步以及IR/光学/UV(IROUV)战略任务,该战略使命是十分纪念日调查:2020年代(PDAA)的天文学和天文学发现途径和天文学发现的途径。该项目的主要目的是从技术准备水平(TRL)3至5中以较大的格式(736×384,282.6k总像素)提高静电致动MSA,以支持PDAA-RECECMONTED IROUV战略任务。
应用机器学习以优化安全记录分数与漏洞相对可能性的相关性
采样方法用于测量突破似然比。对非缝隙组织的队列进行了替换。在每个试验中,通过从每个大小队列('s','M','l')中绘制10,000个非缝隙组织创建了30,000个组织的随机样本。将所有合格的漏洞添加到试验样本中。漏洞可能性比率,在该模型中,将更大的统计权重分配给具有更多漏洞的数据点。重复此过程100次以生成100次试验。然后计算平均突破似然比和标准偏差。


7- ...
七度(DOF)机器人臂具有一个冗余DOF,以避免障碍物和奇异性,必须将其参数化以完全指定给定端e ff ent ector姿势的关节角度。常用于ABB,Motoman和Kuka的常用7-DOF Revolute(7R)工业操纵器以及SSRMS或FREND(例如SSRMS)的空间操纵器通常由肩el-肘(SEW)角度参数列出,用于路径规划和远程运行。我们介绍了一般的缝纫角,该缝隙角可以通过任意参考方向函数概括传统的缝隙角度。冗余参数化(例如常规缝纫角度)沿工作区中的一条线遇到算法奇异性。我们引入了一个参考方向功能选择,称为立体缝隙角度,该角度仅沿着半线具有奇异性,该界限可能无法触及,从而扩大了可用的工作空间。我们证明所有参数化都有算法的奇异性。最后,使用一般的缝纫角度和子问题分解,我们提供了e ffi cient奇异性逆逆运动溶液,这些解决方案通常是封闭形式的,但可能涉及1D或2D搜索。基于搜索的解决方案可以转换为查找多项式根。可以在可公开访问的存储库中获得示例。

Cruz目录www.cruzber.com
是钢筋增强的铝。3个插槽的完美。铝增强轮廓,带有三个插槽,可轻松附着。出色的空气动力学和优雅而实用的设计。更大的抵抗力和抗腐败保护。符合人体工程学:屋顶上材料负载的专业安全。fr条带有所有铝制加固。3个缝隙的轮廓。铝增强轮廓,带有3个缝隙,以安装高度配件。出色的空气动力学,优雅而实用的设计。抵抗力和较高的抗腐败保护。符合人体工程学:屋顶上硬件负载的专业安全。铝。个人资料Dreikan。铝。它被抢劫和最糟糕。符合人体工程学:专业人士Zur Ladung。...另一种语言