机构名称:
¥ 3.0
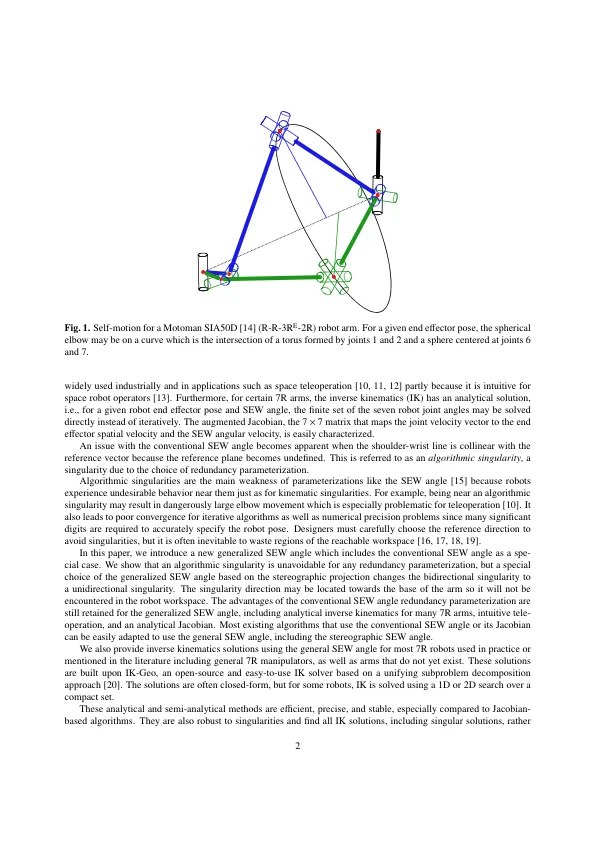
七度(DOF)机器人臂具有一个冗余DOF,以避免障碍物和奇异性,必须将其参数化以完全指定给定端e ff ent ector姿势的关节角度。常用于ABB,Motoman和Kuka的常用7-DOF Revolute(7R)工业操纵器以及SSRMS或FREND(例如SSRMS)的空间操纵器通常由肩el-肘(SEW)角度参数列出,用于路径规划和远程运行。我们介绍了一般的缝纫角,该缝隙角可以通过任意参考方向函数概括传统的缝隙角度。冗余参数化(例如常规缝纫角度)沿工作区中的一条线遇到算法奇异性。我们引入了一个参考方向功能选择,称为立体缝隙角度,该角度仅沿着半线具有奇异性,该界限可能无法触及,从而扩大了可用的工作空间。我们证明所有参数化都有算法的奇异性。最后,使用一般的缝纫角度和子问题分解,我们提供了e ffi cient奇异性逆逆运动溶液,这些解决方案通常是封闭形式的,但可能涉及1D或2D搜索。基于搜索的解决方案可以转换为查找多项式根。可以在可公开访问的存储库中获得示例。
7- ...
主要关键词


相关文件推荐