XiaoMi-AI文件搜索系统
World File Search System缴足

沙特阿美基础油公司 – Luberef 招股说明书
沙特阿美基础油公司-Luberef(“公司”或“发行人”)是一家股份制公司,注册号为(4030010447),注册日期为 03/09/1396(对应 29/08/1976G),并根据商务部 20/01/1444(对应 18/08/2022G)的决议号(1173),由有限责任公司转变为股份制公司,其当前总部位于沙特阿拉伯王国吉达,地址为 7168 Al Minaa, 3072 Petromin Dist.,邮政信箱 5518,邮政编码 22411。本公司现有股本为十六亿八千七百五十万沙特里亚尔(SAR 1,687,500,000),已全额缴足,分为一百六千八百七十五万(168,750,000)股普通股,每股面值十沙特里亚尔(SAR 10)(“ 股份 ”)。截至本招股说明书日期,本公司有两家股东:沙特阿拉伯石油公司(“沙特阿美”),持有本公司(70%)的股本;Jadwa 工业投资公司(“Jadwa”或“JIIC”),持有本公司(30%)的股本(合称“ 现有股东 ”)。

当地 55 家水管工养老金计划
更新后的资金改善计划的替代时间表要求所有雇主的熟练工缴费率从 2020 年 5 月 1 日起提高 0.98 美元/小时(其他类别的缴费率较低者按比例增加),并且基金处于濒危状态的每一年都是如此。截至本通知发布之日,每小时缴费率已提高五次。但是,如果预计该计划在未来某个时间点无法达到预定进度,则可能需要更新资金改善计划。我们不会在没有事先通知您的情况下对计划的福利公式进行任何更改。
联邦债务会对您产生什么影响?
联邦政府还有其他机会改善财政状况,但这些机会不足以让国家走上可持续的财政道路。如果政府限制不正当付款(即不应该付款或付款金额错误的付款),政府可以节省数十亿美元。政府还可以通过收取应缴但未缴的数千亿美元税款的一部分来增加收入。

使用 Unitree A1 四足机器人构建基于视觉的 AI 演示器
展示人工智能 (AI) 能力的挑战之一是找到有效的方式来以切实的方式展示其能力。在本文中,我们使用 Unitree A1 四足机器人展示了一个基于视觉的 AI 演示器。该演示器旨在供苏黎世应用科技大学人工智能中心 (CAI) 使用,以在现实环境中展示 AI 的能力,例如展览。为了实现这一点,我们开发了一个应用程序,允许机器人响应四种特定的手势。该软件从机器人的集成摄像头接收实时图像,并利用 MediaPipe 框架进行手部跟踪和界标点生成,这些界标点实时显示在远程 PC 上。我们根据 3768 个手势记录训练的逻辑回归模型随后会检测站在机器人前面的用户做出的手势。该模型与机器人的系统进行通信,允许通过用户界面控制其检测和姿势。在我们的实验室测试中,机器人展示了每个手势的平均准确率为 91%。然而,我们发现在强光或弱光环境中,机器人的性能不太可靠,准确率仅为 70%。为了提高机器人在这些条件下的性能,我们建议实施额外的算法或微调 MediaPipe 管道。总的来说,我们的演示器为 CAI 部门提供了一个展示 AI 的宝贵工具,因为它允许观众使用直观的手势与机器人互动,并通过观察机器人的即时反应来亲身体验 AI。

vero:带有真空清洁剂的四足机器人,用于垃圾垃圾
摘要 - 如今,上线对许多生态系统的平衡构成了重大威胁。一个例子是大海,垃圾来自海岸和城市,通过排水沟,街道和水道,在分解过程中释放有毒的化学物质和微塑料。垃圾去除通常是由人手动执行的,这本质上会降低可以从环境中有效收集的废物量。在本文中,我们提出了一个新颖的四足机器人原型,由于其自然机动性,它能够自主收集烟头,这是全球第二常见的最常见的无垃圾废物,在很难触及轮式和追踪机器人的地形上。我们方法的核心是用于垃圾检测的卷积神经网络,其次是时间优化的计划者,用于减少收集所有目标对象所需的时间。精确的垃圾去除,该过程驱动了真空吸尘器的喷嘴,该清洁器连接到检测到的香烟屁股顶部的机器人腿上之一。由于喷嘴的这种特殊位置,我们能够执行收集任务,而无需停止机器人的运动,从而大大增加了整个过程的时间效率。在六个不同的室外场景中进行了广泛的测试,以显示我们的原型和方法的性能。对作者的最佳知识,这是第一次提出这种设计和方法并在腿部机器人上成功测试。

皇家足病学院对HEIW的AHP劳动力发展计划的评论
无缝的劳动力模型,包括公共卫生角色,我们不清楚“按AHP数字来绘制的“ heiw of to to Strategic of Strategic of to Strategic”计划”。皇家足病学院支持一种方法,该方法促进了在初级和社区护理中直接获得足病医生的机会,威尔士已经存在各种服务。因此,我们渴望了解该声明的含义 - 例如,它是否是指对于AHP的初级和社区护理中可以创建多少个新角色,这些角色可能是这些角色,这些角色可能是(例如,首先联系从业人员),已经在初级和社区护理中工作的AHP的数量,还是主要的护理护理和社区保健和社区保健和社区保健服务的整合。

使用进化机器人方法生成多足机器人群的集体行为
摘要 本文演示了如何基于进化机器人方法生成多足机器人群的集体行为。群体机器人领域的大多数研究都是使用轮式驱动的移动机器人进行的。本文重点研究如何使用多足机器人群生成集体行为。进化机器人方法用于设计机器人控制器。将基于直觉的约束因素纳入适应度函数,使机器人的步态与自然生物相似。使用 PyBullet 物理引擎在计算机模拟中进行了排队任务实验。机器人控制器由具有单个隐藏层的循环神经网络表示。实验结果表明,提出的约束因素成功地设计了与自然生物相似的机器人步态。结果还表明,进化机器人方法成功地设计了多足机器人群集体行为的机器人控制器。
gasb-68-代理说明-会计-估价报告-2023.pdf
加州公务员退休法 (PERL) 第 20814(c) 条规定,所有公职人员的雇主缴费率由精算师每年确定,并于费率变更通知后的 7 月 1 日生效。计划总缴费率通过 CalPERS 的年度精算估值流程确定。精算确定的费率是估计的为员工在一年内获得的福利成本提供资金所需的金额,另外还有一笔金额用于为任何未拨备的应计负债提供资金。雇主需要缴纳精算确定的费率和员工缴费率之间的差额。如果计划合同有所修改,雇主缴费率可能会发生变化。雇主为满足养老金计划条款中确定为计划成员缴费要求的缴费要求而支付的款项被归类为计划成员缴费。
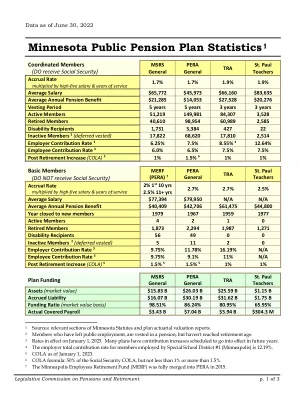
截至 2022 年 6 月 30 日的明尼苏达州公共养老金计划统计数据
平均工资 $65,772 $45,973 $66,160 $83,635 平均年度养老金福利 $21,285 $14,053 $27,528 $20,276 归属期 5 年 5 年 3 年 3 年 活跃会员 51,219 149,981 84,307 3,528 退休会员 40,610 98,954 60,989 2,585 残障人士福利金领取者 1,731 3,384 427 22 非活跃会员 2(延期归属) 17,822 68,620 17,810 2,514 雇主缴费率 3 6.25% 7.5% 8.55% 4 12.64% 雇员缴费率3 6.0% 6.5% 7.5% 7.5% 退休后工资上涨幅度(COLA) 5 1% 1.5% 6 1% 1%