机构名称:
¥ 1.0
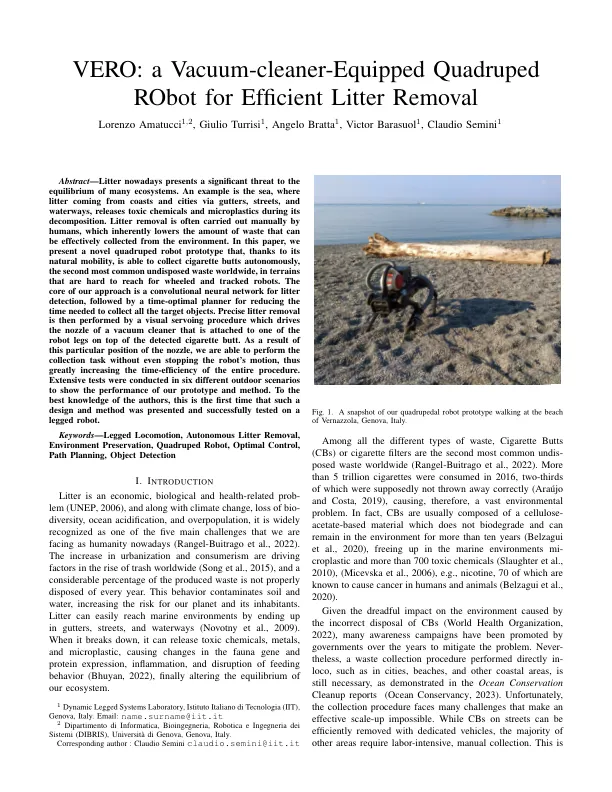
摘要 - 如今,上线对许多生态系统的平衡构成了重大威胁。一个例子是大海,垃圾来自海岸和城市,通过排水沟,街道和水道,在分解过程中释放有毒的化学物质和微塑料。垃圾去除通常是由人手动执行的,这本质上会降低可以从环境中有效收集的废物量。在本文中,我们提出了一个新颖的四足机器人原型,由于其自然机动性,它能够自主收集烟头,这是全球第二常见的最常见的无垃圾废物,在很难触及轮式和追踪机器人的地形上。我们方法的核心是用于垃圾检测的卷积神经网络,其次是时间优化的计划者,用于减少收集所有目标对象所需的时间。精确的垃圾去除,该过程驱动了真空吸尘器的喷嘴,该清洁器连接到检测到的香烟屁股顶部的机器人腿上之一。由于喷嘴的这种特殊位置,我们能够执行收集任务,而无需停止机器人的运动,从而大大增加了整个过程的时间效率。在六个不同的室外场景中进行了广泛的测试,以显示我们的原型和方法的性能。对作者的最佳知识,这是第一次提出这种设计和方法并在腿部机器人上成功测试。
vero:带有真空清洁剂的四足机器人,用于垃圾垃圾
主要关键词



相关文件推荐