XiaoMi-AI文件搜索系统
World File Search System脑臂
稳态视觉诱发电位识别与便携式脑机接口系统实现
致谢 ............................................................................................................................. 67
元宇宙系列深度研究:脑机接口现状与未来
号质量,提高信噪比。特征提取根据特定的BCI范式所设计的心理活动任务相关的神经信号规律,采用时域、频域、空域方法或相 结合的方法提取特征。模式识别通过采用先进的模式识别技术或机器学习算法训练分类模型,针对特定的用户定制特征提取和解 码模型。 3. 控制接口:根据具体的通信或控制应用要求,控制接口把上述解码的用户意图所表征的逻辑控制信号转换为语义控制信号,并由

伸缩臂 - 65-J
高度 工作高度* 平台高度 行驶高度 最大伸展 转盘摆动 副臂运动范围 平台旋转 平台尺寸和容量 总起重能力 人员容量 平台宽度 平台深度 平台入口尺寸 收藏长度(整体) 宽度 整体高度 尾摆 重量**(大约) 工作条件 行驶 爬坡能力 离地间隙 突破角 车轴振动 轮胎 功率 动力源 燃油容量 液压油容量 运动 转弯半径(内部) 行驶速度 动臂提升速度 动臂伸展速度 副臂提升速度

用单臂3- ...
摘要:这项工作提出了配备了单臂3度的机器人操纵器的无人机的设计和开发,旨在增强无人机(无人机)的多功能性和功能。机器人臂的整合将无人机的功能扩展到传统的空中监视之外,从而使其能够在各个行业和社会领域执行复杂的操纵任务。该项目涵盖了几个关键阶段,包括使用SOLIDWORKS设计机器人臂和与PLA材料的3D打印,使用ROS2 Humble实施控制算法,以及与飞行控制器板集成以进行无缝操作。通过一种全面的方法,该项目旨在通过附加的操纵器实现无人机的最佳设计,精确控制和有效的操作。这项研究的结果与行业,社会和学术机构具有很大的相关性,这有助于机器人和无人系统的技术创新,社会影响以及进步。关键字:无人机;机器人; 3dof;操纵器;臂
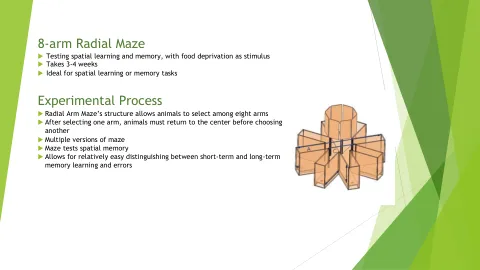
8臂自由基迷宫
在适当大小的支架和腔室中的响应传感器平台中。惊吓的神经生物学。Koch M.,Prog Neurobiol。 1999年10月; 59(2):107-28-惊吓调制的翻译价值。 Fendt M,Koch M.,细胞组织Res。 2012年10月:354(1):287-95脑干电路介导惊吓反射的抑制。 Fendt M,Li L,Yeomans JS。 心理药理学(Berl)。 2001 Jul; 156(2-3):216-24声学惊吓反射:神经元和连接。 Yeomans JS,弗兰克兰PW。 大脑res res res rev. 1995年11月; 21(3):301-14Koch M.,Prog Neurobiol。1999年10月; 59(2):107-28-惊吓调制的翻译价值。Fendt M,Koch M.,细胞组织Res。 2012年10月:354(1):287-95脑干电路介导惊吓反射的抑制。 Fendt M,Li L,Yeomans JS。 心理药理学(Berl)。 2001 Jul; 156(2-3):216-24声学惊吓反射:神经元和连接。 Yeomans JS,弗兰克兰PW。 大脑res res res rev. 1995年11月; 21(3):301-14Fendt M,Koch M.,细胞组织Res。2012年10月:354(1):287-95脑干电路介导惊吓反射的抑制。Fendt M,Li L,Yeomans JS。 心理药理学(Berl)。 2001 Jul; 156(2-3):216-24声学惊吓反射:神经元和连接。 Yeomans JS,弗兰克兰PW。 大脑res res res rev. 1995年11月; 21(3):301-14Fendt M,Li L,Yeomans JS。心理药理学(Berl)。2001 Jul; 156(2-3):216-24声学惊吓反射:神经元和连接。Yeomans JS,弗兰克兰PW。大脑res res res rev.1995年11月; 21(3):301-14

入口式脑机接口设备的兼容安全性讨论
5 上海交通大学生物医学工程学院,上海,200030 【摘要】脑机接口(BCI)设备是进行神经刺激和记录的重要工具,在神经系统疾病的诊断和治疗中有着广阔的应用前景。此外,磁共振成像(MRI)是一种有效且非侵入性的全脑信号捕获技术,可以提供大脑结构和激活模式的详细信息。将BCI设备的神经刺激/记录功能与MRI的非侵入性检测功能相结合对脑功能分析具有重要意义。然而,这种结合对神经接口设备的磁和电性能提出了特定的要求。首先探讨了BCI设备与MRI之间的相互作用,随后对二者结合可能产生的安全风险进行总结和整理,从BCI设备的金属电极、导线等危害的来源入手,分析了存在的问题,并总结了目前的研究对策。最后,简要讨论了BCI磁共振安全性的监管问题,并提出了增强相关BCI设备磁共振兼容性的建议。


基于P300 SSVEP的双人协同脑控机械臂汉字书写系统
ISSN 1004‑9037,代码元SCYCE4数据采集与处理杂志卷。37,编号6,2022年11月,第pp。1401-1411 doi:10。16337/j。1004-9037。2022。06。020ⓒ2022撰写的数据采集与处理杂志

双横臂悬架上控制臂材料优化
将总重量减轻 10-12%。 通过材料比较优化上控制臂。 降低零部件成本并提高车辆性能。 3. 力的计算 A. 静态条件 地球引力 W=mg 通过重心作用。它作用于轮胎和道路之间的接触面。为假设作用于车辆的边界条件,考虑了 SUV 的上控制臂。该 SUV 来自 TATA Motors,型号为 Safari。令 R 1 为前轴重量,R 2 为后轴重量。重量必须分为前轴重量和后轴重量。前轴占总重量的 52%,后轴占总重量的 48%。车辆总重量 = 2650 kg = 25987.6 N 因此,前轴重量 = 1378 kg = 13513.5 N 一个车轮的反作用力 = 1378/2 = 689 kg = 6756.8 N 因此,后轴重量 = 1272 kg = 12474.05 N