XiaoMi-AI文件搜索系统
World File Search System脑臂

多臂老虎机的量子探索算法
简介 多臂老虎机 (MAB) 模型是强化学习中最基本的设置之一。这个简单的场景捕捉到了诸如探索和利用之间的权衡等关键问题。此外,它还广泛应用于运筹学、机制设计和统计学等领域。多臂老虎机的一个基本挑战是最佳臂识别问题,其目标是有效地识别出具有最大预期回报的臂。这个问题抓住了实际情况中的一个常见困难,即以单位成本只能获得有关感兴趣系统的部分信息。一个现实世界的例子是推荐系统,其目标是找到对用户有吸引力的商品。对于每个推荐,只会获得对推荐商品的反馈。在机器学习的背景下,最佳臂识别可以被视为主动学习的高级抽象和核心组件,其目标是尽量减少底层概念的不确定性,并且每个步骤仅显示被查询的数据点的标签。量子计算是一种有前途的技术,可能应用于密码分析、优化和量子物理模拟等不同领域。最近,量子计算设备已被证明在特定方面的表现优于传统计算机

机器人臂和武器末端工具
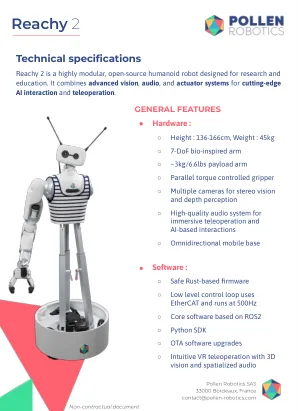
具有挑战性。这里的建议是寻找一个预先集成和预验证的ROS2捆绑包,其中还包含有用的软件包,例如MoveIt进行运动计划。Advantech建议选择主机控制器,这些主机控制器支持CODESYS,以减少开发工作。无论选择哪种操作系统(即Linux,Ubuntu或Windows),这可以实时控制机器人武器。对于将来的服务机器人应用程序,需要将AI(人工智能)例程集成到运动控制软件之上。ABB机器人部总裁Marc Segura表示,AI正在增强机器人的抓地力,选择和地点的能力。对于服务机器人来说也是如此。Advantech为工业机器人提供支持Canopen和CIA 402的ROS2软件套件,也可以用于服务机器人。

GIIST_潜在导师名单_博士联合项目_2425.xlsx
类脑计算是借鉴脑科学基本原理,打破 “ 冯诺依曼 ” 架构束缚的新型计算技术。本研究组将从理论和器件两个方向对类脑计算展开协同 研究。 理论方面:研究类脑计算架构、模型和算法,探索基于类脑计算的类脑智能的基础理论;借鉴神经元模型、神经环路传导、神经编码 及认知、学习、记忆、决策等神经机制,逐步建立和完善类脑处理信息处理的数学 / 计算原理和模型;构建类脑计算和智能的统一理论 框架。为类脑计算器件及系统的发展提供理论基础。 器件方面:基于新材料和新技术,研究新型高性能类脑神经器件,解决一致性差、可靠性差、规模化难等痛点;研究基于类脑神经器 件的网络架构,构建大规模阵列,开展外围电路的研发与设计;研究基于新型类脑器件的感知和计算架构,发展感存、存算、感存算 一体系统。

SenseWear™ 臂带的准确性和可靠性...
摘要——消费者和研究人员缺乏一种易于使用、可靠且经济高效的方法来准确评估身体活动和能量消耗,这是成功控制体重的关键因素。BodyMedia 通过开发 SenseWear 臂带满足了这一需求,该臂带利用 2 轴加速度计、热通量传感器、皮肤电反应传感器、皮肤温度传感器和近体环境温度传感器来收集数据,从而计算能量消耗。本文概述了相关研究,这些研究展示了 SenseWear 臂带如何提供非常低的能量消耗错误率,相对于更昂贵、限制更多且难以使用的设备,以及它如何是一种经济高效且简单的解决方案,可在实验室外应用以跟踪和探索能量消耗。索引术语——SenseWear 臂带、能量平衡、传感器阵列、能量消耗、TEE、AEE、REE、消耗评估身体活动评估、情境检测、自由生活环境、准确性和可靠性、可穿戴计算机。简介 增加身体活动量以及实现和维持能量平衡已成为 21 世纪重要的个人健康目标。卫生专业人员深知,许多主要的健康问题都是由缺乏身体活动以及摄入的热量多于消耗的热量而引起或加剧的。肥胖症流行及其相关问题,包括高血压、II 型糖尿病、冠状动脉疾病、关节炎和慢性背痛,都证明了久坐的生活方式和超重会导致生活质量低下,在许多情况下还会导致过早死亡。虽然卫生专业人员以及有体重问题的个人都承认需要改善和维持他们的锻炼和饮食行为,但他们缺乏准确测量能量消耗所需的工具,而能量消耗是确定一个人消耗的能量是否多于摄入能量的重要身体测量指标。为了减肥,一个人首先必须能够准确量化活动量和能量消耗。只有这样,他们才能开始对日常生活进行必要的适当改变,以帮助他们提高活动量和调整卡路里摄入量。到目前为止,还没有一种易于使用、可靠且准确的方法可以在实验室环境之外定期评估身体活动量和能量消耗。这对体重有重大影响

无线手部运动控制机器人夹持臂
在各种自动化行业中,无线活动是必需的,特别是在危险或危险区域的偏远地区。在许多行业中,需要处理一些非常热的工作,而人手无法做到,在这种情况下,无线操作效率更高。该项目专注于使用微控制器在 X-bee 和无线传感器网络的帮助下设计手势控制的机械臂。它由两部分组成,通过无线传感器通信系统相互连接。X-bee 将充当发射器和接收器设备系统。主要部分由装有锂离子电池、微控制器和柔性传感器的手套组成。第二部分由电机、微控制器和机器人手指组成,机械动作通过它们发生。

用EEG信号自动操纵机器人臂
摘要 - 该项目具有客观地识别使用传感器“情感EEG Neuroset”的一些面部表情。此设备是一种能够通过脑电图技术(EEG)接收和解释大脑生物电活动的传感器,此外,还具有16个通道,并连续准确接受脑电波。此外,传感器具有易于使用的SDK,即使没有任何大脑信号获取经验,任何人即使没有任何经验。Emotiv®数据被转移到MATLAB®进行过滤脑电波,以通过串行通信向Arduino发送信息。因此,在Arduino板上获得了三种不同表达式的识别,即眨眼,眨眼和微笑,每个表达式在Arduino板上都有不同的LED颜色。

提高制造效率:新的机器人臂...
本研究提出了一种最新的机器人臂系统,旨在改善注塑机的组装线中的选择和包装程序。该系统通过整合带有多功能最终效应子的六度自由机器人手臂来解决重大的工业困难,包括劳动力和高错误率。该设计的一个出色特征是类人动物的手,根据任务的需求,已精心构造,以真空,PINCE或其他特定工具的方式易于替换。机器人系统是使用AutoCAD,Fusion 360和SolidWorks创建的,可确保准确性和灵活性。这种适应性能够实现各种用途,从而极大地提高了运营效率和卓越性能,同时最大程度地减少了对手动工作的需求。调查结果说明了这种机器人系统将在许多生产行业中部署的能力,从而强调了其灵活性和可扩展性。

专题前言:脑科学的物理电子学...
DOI: 10.7498/aps.71.140101 类脑计算技术作为一种脑启发的新型计算技术 , 具有存算一体、事件驱动、模拟并行等特征 , 为 智能化时代开发高效的计算硬件提供了技术参考 , 有望解决当前人工智能硬件在能耗和算力方面的 “ 不可持续发展 ” 问题 . 硬件模拟神经元和突触功能是发展类脑计算技术的核心 , 而支持这一切实现 的基础是器件以及器件中的物理电子学 . 根据类脑单元实现的物理基础 , 当前类脑芯片主要可以分 为数字 CMOS 型、数模混合 CMOS 型以及新原理器件型三大类 . IBM 的 TrueNorth 、 Intel 的 Loihi 、清华大学的 Tianjic 以及浙江大学的 Darwin 等都是数字 CMOS 型类脑芯片的典型代表 , 旨 在以逻辑门电路仿真实现生物单元的行为 . 数模混合型的基本思想是利用亚阈值模拟电路模拟生物 神经单元的特性 , 最早由 Carver Mead 提出 , 其成功案例有苏黎世的 ROLLs 、斯坦福的 Neurogrid 等 . 以上两种类型的类脑芯片虽然实现方式上有所不同 , 但共同之处在于都是利用了硅基晶体管的 物理特性 . 此外 , 以忆阻器为代表的新原理器件为构建非硅基类脑芯片提供了新的物理基础 . 它们 在工作过程中引入了离子动力学特性 , 从结构和工作机制上与生物单元都具有很高的相似性 , 近年 来受到国内外产业界和学术界的广泛关注 . 鉴于硅基工艺比较成熟 , 当前硅基物理特性是类脑芯片 实现的主要基础 . 忆阻器等新原理器件的类脑计算技术尚处于前沿探索和开拓阶段 , 还需要更成熟 的制备技术、更完善的系统框架和电路设计以及更高效的算法等 .