XiaoMi-AI文件搜索系统
World File Search System自动机

什么是人工智能?为什么人工智能可能对教育有用?
有了定义,让我们回顾一下人工智能的起源。几个世纪以来,人类一直对创造生物(包括人类)的代表任务很感兴趣。这些代表通常被称为自动机,它们可以追溯到中世纪,甚至可能更早。在 19 世纪和 20 世纪初,自动机的受欢迎程度达到了顶峰。从可以翻筋斗的熊到可以看到另一个自动机一半的魔术师,再到在金笼子里唱歌的夜莺,这些派对装饰品越来越复杂,也许可以被视为人工智能的先驱。或者更准确地说,我们可以认为它们是控制论领域的先驱,控制论是一门科学研究领域,探索动物和机器中的控制和通信。控制论研究由 Norbert Viner 在 20 世纪中叶发起,至今仍是机器人功能的核心。这些控制论机器人的前身是机械的,而不是智能的,但它们的创造影响了机器人领域的发展。即使在今天,也并非所有机器人都是智能的;有些机器人只是通过快速完成机械的、重复的任务来节省劳动力。然而,许多机器人也是智能的,这是人类长期以来渴望创造能够以智能方式行事的物体的一部分。我们也喜欢讲述关于行为智能的物体的故事,机器人长期以来一直是电影制作行业的最爱。谁不能不被《星球大战》中的 C-3PO、2 等机器人角色所喜爱呢?

有效计算普通语言的密度-LIX
摘要。如果长度m的分数m在某些固定的签名上,则称为浓密的语言l,如果m倾向于固定的签名。我们提出了一种算法,该算法在多项式时间内计算(f m)的(f m)的累积点数量,如果常规语言L由有限的确定性自动机给出,然后还可以效率地检查L是否密度。确定(f m)的最低认可点是否大于给定的有理数数字。如果常规语言由非确定性自动机给出,请检查L是否致密。我们将这些问题作为部分可观察到的马尔可夫链的收敛问题,并将其减少为结合有理数序列的问题。
WH!JITARV WiMHllEIAREI-http://quicksearch.dla.mil
4.5.10 监控.................... ... . ... ... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.S.11 核武器发射和引信(A&FJ 时间 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.S.11.3.1 直流信号要求 . . . . . . . . . . . . . . . . . . . . . 4.S.11.3.2 照明要求 . . . . . . . . . . . . . . . . . . . . 4.5.11.4 防雷保护 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.S.113 电缆管理器设计. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.S.1 13.2.1 连接器误额定/错位分析 . . . . . . . . . . 43.11 .S.2.2 电缆静音 mml@s. . . . . . . . . . . . . . . . . . 43.11.6 非分类 t~tfflgmmptlMli~. . . . . . . . . . . . . . . 。 。 4.S.11.6.1 Da”gnmquiremmt。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 4.S.11.6.2 Ewdurhon 要求。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 4.5.11.7 规范和要求 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-S.11.8 评估设备. ... ................. ... . . . 4.5.11.9.2 评估要求 . . . . . . . . . . . . . . . . . . 45.11.10 预兆或释放传感装置 . . . . . . . . . . . . . . 4.S.11.10.1 设计要求 . . . . . . . . . . . . . . . . . . . . . . . . 4.S.11.10.2 环境设备. . . . . . . . . . . . . . . . 4.5.12 自动机软件. . . . . . . . . . . . . . . . . . . 45.12.1 一般要求. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.S.12.1.1.2 高阶 lmrguagc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.S.12.1.13 Hkmr'chimldcsign . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.5.12.1.1-S Hmdvmrcinitializnlionmrd sbutdown . . . . . . . . . . . . . . 4.S.12.1.1.6 ~ulttolcmn= nndemr 处理 . . . . . . . . . . . . . . . . 4_5.12.ll7 间歇 . . . . . . . . . . . . . ... .... ... ... 4.5.11.9.2 评估要求 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.S.11.10.2 环境设备. . . . . . . . . . . . . . 4.5.12 自动机软件. . . . . . . . . . . . . . . . . . 45.12.1 一般要求. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.S.12.1.1.2 高阶 lmrguagc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.S.12.1.13 Hkmr'chimldcsign . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.5.12.1.1-S Hmdvmrcinitializnlionmrd sbutdown . . . . . . . . . . . . . . 4.S.12.1.1.6 ~ulttolcmn= nndemr 处理 . . . . . . . . . . . . . . . . 4_5.12.ll7 间歇 . . . . . . . . . . . . . ... .... ... ... 4.5.11.9.2 评估要求 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.S.11.10.2 环境设备. . . . . . . . . . . . . . 4.5.12 自动机软件. . . . . . . . . . . . . . . . . . 45.12.1 一般要求. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.S.12.1.1.2 高阶 lmrguagc . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.S.12.1.13 Hkmr'chimldcsign . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.5.12.1.1-S Hmdvmrcinitializnlionmrd sbutdown . . . . . . . . . . . . . . 4.S.12.1.1.6 ~ulttolcmn= nndemr 处理 . . . . . . . . . . . . . . . . 4_5.12.ll7 间歇 . . . . . . . . . . . . . ... .... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .... .... .... .... .... .... 4.5.12.1.1.8 调度管理选项 . .... .... .... .... .... .... .... .... .... ..... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .... .... .... .... .... .... 4.5.12.1.1.8 调度管理选项 . .... .... .... .... .... .... .... .... .... ....

简历
2021 局部解码颜色代码 TQC 2021(在线),录音:https://youtu.be/jUYOjC9Z68g 1QB 信息技术(在线) 2020 具有噪声测量及其他特性的拓扑码的细胞自动机解码器 量子代码设计和架构研讨会(在线) 加拿大魁北克省舍布鲁克大学 2019 年 3 月 具有边界的拓扑码的细胞自动机解码器 APS 三月会议,美国马萨诸塞州波士顿 量子代码设计和架构启动会议,法国巴黎 2018 使用 3D 表面码进行量子计算 圆周研究所,安大略省滑铁卢,录音:https://doi.org/10.48660/18110080 Quantum Roundabout 2018,英国诺丁汉 北方量子会议,英国达勒姆
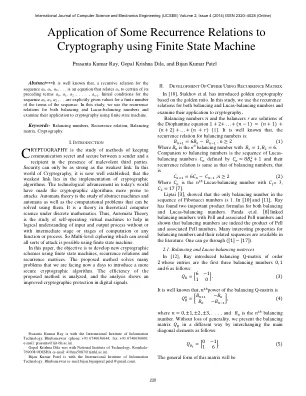
将某些复发关系应用于密码学...
ryptography是对在恶毒第三方存在下保持沟通秘密和安全性的方法的研究。安全性只能与最弱的链接一样强。在这个密码学世界中,现在已经确立了最薄弱的链接在于加密算法的实施。当今世界的技术进步使加密算法更容易发作。自动机理论是对抽象机和自动机的研究,以及可以使用它们解决的计算问题。这是在离散数学下的理论计算机科学中的理论。因此,自动机理论是对自动操作虚拟机的研究,可以帮助对输入和输出过程的逻辑理解,而无需计算或任何功能或过程的中间阶段或阶段。因此,使用有限状态机可以,可以避免各种攻击的多级密码。在本文中,目的是使用有限状态机器,复发关系和复发矩阵开发新的加密方案。所提出的方法解决了我们现在面临的许多问题,以引入更安全的加密算法。分析了该方法的效率,分析显示了数字信号中的加密保护的改进。Prasanta Kumar Ray与Bhubaneswar国际信息技术学院一起(电话:+91 6746666644;传真:+91 6746636600;电子邮件:prasanta@iiiit-bh.ac.in)。Gopal Krishna Dila与国立技术学院一起,Rourkela- 769008 Odisha(电子邮件:410ma5087@nitrkl.ac.in)。Bijan Kumar Patel与国际信息技术研究所,布巴内斯瓦尔(电子邮件:bijan.bijanpatel.patel@gmail.com)。Bijan Kumar Patel与国际信息技术研究所,布巴内斯瓦尔(电子邮件:bijan.bijanpatel.patel@gmail.com)。
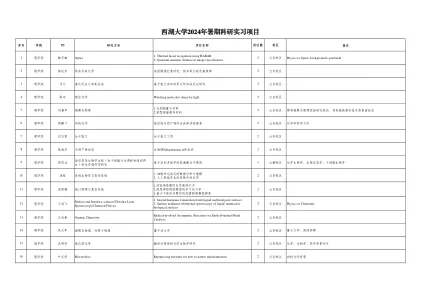
西湖大学2024年暑期科研实习项目
1。自动机器学习的更广泛主题2。对端到端自主驾驶,视觉感知的应用研究3。构建未来的数据中的自动智能AI系统4。探索AI和科学的跨学科未来研究可能性,最好使用AI帮助知识发现

DR.BIPLAB DAS 指定
量子细胞自动机。”微系统技术,Biplab Das、Avijit Kumar Paul 和 Debashis De,第 1 卷 (28),第 1-14 页,ISSN:1432-1858 (2020) “使用 Actin 量子细胞进行纳米通信的路由器设计
博弈树、电脑游戏和博弈论 - 苏黎世联邦理工学院
从这个方面来看,自动化游戏一直与人工智能联系在一起,甚至早在这个名称的研究领域出现之前就存在了。 250年前,沃尔夫冈·冯·肯佩伦男爵 (Baron Wolfgang von Kempelen) 制造并演示了魅力十足的 Chess Turk,这可以作为一个起点(尽管之前就已经存在外形像玩偶、可以手写字的精致机械自动机)。虽然整个事情是个骗局,因为一个精通国际象棋的小人隐藏在土耳其木偶的齿轮中,并通过一根杆子控制它,但国际象棋机器的魅力已经达到了公众的程度。甚至查尔斯·巴贝奇也曾在与 Chess Turk 的比赛中落败,但在 19 世纪中叶,他设计了“一台能够成功玩纯智力游戏的机器;例如针锋相对、选秀、国际象棋等。”并得出了一个核心结论:“我很快就发现,每一种技巧游戏都可以由自动机来玩。”

VW ID.4 GTX 220 kW 2022 299hp
加热的窗户加热窗户窗户热块窗户:前噪声降低窗户噪音降低窗户:前部特殊功能:自动机aktivering avstrålkastare,dynamiska blinka blinker blinkers自动大灯激活动态转向信号指南灯:门把手