XiaoMi-AI文件搜索系统
World File Search System舱为

Z10.3 - 化学品船船体检验 - ClassNK
化学品船船体检验 目录 1.总则 1.1 适用范围 1.2 定义 1.3 修理 1.4 厚度测量和近距检验 1.5 遥感检查技术 (RIT) 2.特别检验 2.1 附表 2.2 范围 2.2.1 总则 2.2.2 干船坞检验 2.2.3 液舱保护 2.3 整体检验和近距检验的范围 2.4 厚度测量的范围 2.5 液舱试验的范围 2.6 船龄超过 10 年的化学品船 3.年度检验 3.1 附表 3.2 范围 3.2.1 总则 3.2.2 船体检查 3.2.3 露天甲板检查 3.2.4 货泵舱和管隧检查(如有) 3.2.5 压载舱检查 4.中间检验 4.1 时间表 4.2 范围 4.2.1 总则 4.2.2 船龄 5 - 10 年的化学品船 4.2.3 船龄 10 - 15 年的化学品船 4.2.4 船龄 15 年以上的化学品船 5.检验准备 5.1 检验计划 5.2 检验条件 5.3 进入结构 5.4 检验设备 5.5 救援和应急响应设备 5.6 海上或锚地检验 5.7 检验计划会议 6.船上文件 6.1 总则 6.2 检验报告文件 6.3 支持文件 6.4 船上文件审查

对重式太空电梯的三维分析
摘要 迄今为止研究的太空电梯主要是爬升式,即用缆绳连接地面和空间站,爬升器沿着缆绳上升和下降来运送有效载荷。然而,这种类型的系统存在一些问题,例如难以为爬升器提供能量,并且由于运行过程中缆绳和爬升器车轮的磨损,使用寿命较短。为了避免这些问题,在本研究中,我们研究了一种新型的配重式太空电梯。该系统由两根缆绳组成:一根承受施加在结构上的张力的导向缆绳和一根连接两个吊舱的移动缆绳,吊舱两端各一根,连接到空间站的驱动轮上,通过驱动车轮来运送吊舱中的有效载荷。在本研究中,我们利用我们小组开发的点质量缆绳模型分析了在空间站和地面之间应用配重式缆绳时的缆绳动力学,并计算了实际运行所需的能量。因此,当在火星重心(海拔 3,900 公里)和地面之间使用平衡型,而在高于该高度使用爬升型时,该系统消耗的能量比传统的爬升型太空电梯要少。关键词:空间科学、空间技术、太空电梯命名法
海军舰船夹层结构X型接头的设计
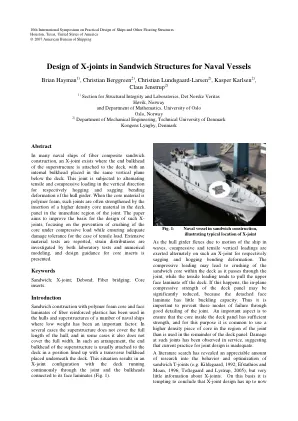
在许多采用纤维复合材料夹层结构的海军舰艇中,上层建筑的端舱壁与甲板连接处都存在 X 型接头,而内部舱壁则位于甲板下方的同一垂直平面内。该接头在垂直方向上承受交替的拉伸和压缩载荷,分别使船体梁产生上拱和下垂弯曲变形。当芯材为聚合物泡沫时,此类接头通常通过在接头附近的甲板面板中插入更高密度的芯材来加强。本文旨在改进此类 X 型接头的设计基础,重点是防止芯材在压缩载荷下破碎,同时确保在拉伸载荷情况下具有足够的损伤容限。文中报告了大量材料试验,通过实验室试验和数值建模研究了应变分布,并提供了芯材插入件的设计指导。

TECHNOTES - 复合材料制造技术中心
目标 CH-53K STA 315 舱壁上的 T 型法兰复合材料部件由于高压釜固化而出现大量废品率。在固化周期内,袋侧低压区会反复出现缺陷(凸起),导致 T 型法兰半径出现折痕。这些缺陷导致舱壁袋侧半径上的 T 型法兰废品率为 20%。为了消除这些反复出现的缺陷并最终将废品率降至最低,ManTech 开发了此项目,以评估三角填料成型工具方法在带有 T 型法兰的 CH-53K 部件制造过程中的应用,确保形成足够的三角区域和袋侧半径。评估了使用成型三角填料(形状与填料区域(包括榫接)相匹配)的情况。这样做是为了确保在铺层过程中重复应用准确数量且形状正确的材料。

Ikhana:支持长期地球科学任务的 NASA UAS
NASA Ikhana 无人机 (UAV) 是通用原子航空系统公司 (加利福尼亚州圣地亚哥) MQ-9 Predator-B 的改进版,用于支持 NASA 科学任务理事会以及通过合作伙伴关系与其他政府机构和大学开展地球科学任务。它可以在航空电子设备舱和外部吊舱中携带超过 2000 磅的实验有效载荷,并且能够在 40,000 英尺以上的高度执行超过 24 小时的任务。该飞机由移动地面控制站 (GCS) 远程驾驶,该控制站设计为可通过空中、陆地或海上部署。机载支持功能包括仪表系统和机载研究测试系统 (ARTS)。Ikhana 项目将于 2007 年初完成 GCS 开发、科学支持系统集成、外部吊舱集成和飞行许可以及操作人员培训。目前计划于 2007 年夏季进行大面积遥感任务。关键词:Predator-B、地球科学平台、高空长航时 (HALE)、Ikhana、UAS、UAV。

第 8 部分 防火和灭火 第 8 部分... - KR e-class
第 1 节 总则 ····················································································································· 1 第 2 节 舱口、舷梯和释放装置 ·· ...油处所······························· 6 第5节 货油处所舱壁········································································ 19 第6节 翼油舱的相对变形······························································································ 28 第7节 焊接·· ... ····································· 32 第 10 节 油船的管道系统和通风系统 ·········································· 35 第 11 节 电气设备 ·········································································································· 41
规则 - KR e-class
第 1 节 总则 ··················································································································· 1 第 2 节 舱口、舷梯和释放装置 ·· ...油处所······························· 6 第5节 货油处所舱壁·········································································· 19 第6节 翼油舱的相对变形·········································································································· 28 第7节 焊接·· ... ····································· 32 第 10 节 油船的管道系统和通风系统 ·········································· 35 第 11 节 电气设备 ·········································································································· 41
远洋船舶入级检验规则附件 ...
处所及其可燃性信息、耐火和阻燃分隔开口的关闭装置、门的关闭、罩壳、通风管道、烟囱的环形空间、天窗和货舱、机械舱和泵舱的其他开口,以及消防、火灾报警和探测系统的描述(描述可包含在规范中,参见本附件 3.1);
Ikhana:支持长期地球科学任务的 NASA UAS
NASA Ikhana 无人机 (UAV) 是通用原子航空系统公司 (加利福尼亚州圣地亚哥) MQ-9 Predator-B 的改进版,用于支持 NASA 科学任务理事会以及通过合作伙伴关系与其他政府机构和大学开展地球科学任务。它可以在航空电子设备舱和外部吊舱中携带超过 2000 磅的实验有效载荷,并且能够在 40,000 英尺以上的高度执行超过 24 小时的任务。该飞机由移动地面控制站 (GCS) 远程驾驶,该控制站设计为可通过空中、陆地或海上部署。机载支持功能包括仪表系统和机载研究测试系统 (ARTS)。Ikhana 项目将于 2007 年初完成 GCS 开发、科学支持系统集成、外部吊舱集成和飞行许可以及操作人员培训。目前计划于 2007 年夏季进行大面积遥感任务。关键词:Predator-B、地球科学平台、高空长航时 (HALE)、Ikhana、UAS、UAV。
风淋室操作手册
步骤 4:移除每个机械外壳上的机械外壳面板。使用机械起重设备(如果空间允许,可使用叉车)将第一个屋顶部分抬高到墙壁上方,沿着墙壁和机械部分的顶部涂上密封剂,然后将屋顶放低到位。对齐一个角,将 1/2 英寸的方头螺栓穿过屋顶部分(用于墙壁)的孔,插入墙壁上的螺纹舱。您可以通过移除灯罩盖并伸手到墙壁上方的螺栓孔来访问螺栓点。墙壁上有三个螺栓位置。两端各一个,中间一个。灯箱中也有三个机械部分的螺栓位置。机械部分后部的螺栓位置位于机械外壳顶部的 HEPA 过滤器隔间中。有 2 个螺栓。每个角一个。此处螺栓拧入屋顶的接收舱。一次对齐一个角并拧紧螺栓,直到所有四个角和墙壁中心与屋顶对齐。