XiaoMi-AI文件搜索系统
World File Search System设计空间
通过“添加剂晶界工程”拓宽工程材料的设计空间
晶界工程 (GBE) 是改善多晶固体性能的最成功的加工策略之一。然而,GBE 过程中涉及的大量热机械过程限制了其在特定应用和材料中的使用。在这篇观点论文中,我们讨论了增材制造 (AM) 技术提供的扩大 GBE 范式适用性的机会,从而扩大了工程材料的设计空间。通过在 AM 中集成专门设计的热机械加工,可以生产具有复杂几何形状和 GBE 微观结构的块状近净成形零件。我们讨论了这一努力中的主要挑战,并提出了一些实现这一目标的可能策略,我们将其称为“增材-GBE”。

通过“添加剂晶界工程”拓宽工程材料的设计空间
© 2022 作者。本文根据 Creative Commons Attribution 4.0 International 许可证获得许可,允许以任何媒体或格式使用、共享、改编、分发和复制,只要您给予原作者和来源适当的信用,提供 Creative Commons 许可证的链接,并指明是否进行了更改。本文中的图像或其他第三方材料包含在文章的 Creative Commons 许可证中,除非在材料的致谢中另有说明。如果材料未包含在文章的 Creative Commons 许可证中,并且您的预期用途不被法定法规允许或超出允许用途,则您需要直接从版权所有者处获得许可。要查看此许可证的副本,请访问 http://creativecommons.org/licenses/by/4.0/。

研究在线学习者中人工智能介导的社交匹配的设计空间
摘要 近年来,在线教育的需求不断增长。然而,在线学习者经常会遭遇社交孤立,这会对他们的学习体验和学习结果产生负面影响。在本章中,我们研究社交匹配系统的设计空间,以帮助促进在线学习者之间的社交联系。具体来说,我们试图回答三个核心设计问题:(1)应该收集哪些数据?(2)如何设计技术来支持学生之间的互动?(3)学生对人工智能介导的社交匹配的伦理问题有何担忧?我们首先通过现有文献探讨人工智能介导的社交互动的可行性、设计和关注点。然后,我们介绍我们正在进行的关于在在线学习环境中设计和使用人工智能对话代理作为社交匹配系统的工作。最后,我们概述了在线学习中以人为本的社交匹配系统设计研究的未来方向。

开发在航空航天应用程序中连接的不同材料的设计空间
摘要本研究论文介绍了集成过程和产品设计(IPPD)方法的应用,以选择在早期产品设计阶段连接的最佳关节配置。所提出的方法将多标准决策(MCDM)方法与质量功能部署(QFD)集成在一起,以确定关节选择的关键标准,包括携带负载能力,规模,每个关节成本,易于制造,制造业,时间消耗和变形。考虑三种不同的材料配置,考虑了三种类型的接头(铆钉,焊缝和粘合剂)和两个混合接头(粘合焊接和粘合剂 - 杆子):碳纤维炉造型的塑料(CFRP)铝,CFRP钢和铝钢。QFD用于将工作需求转换为设计标准,在第二阶段,采用与理想解决方案相似的订单偏好技术(TOPSIS)用于选择基于上一阶段获得的加权标准的最佳关节配置。然后通过实验研究来验证选定的关节构型。发现的发现,使用QFD-TOPSIS技术的提出的IPPD方法对于在早期设计阶段选择具有不同材料的机械接头具有高度有效的作用。该研究得出结论,粘合铆钉杂交关节是所有替代方案之间的最佳解决方案。提出的方法最终可以提高产品可靠性和性能,并减少开发时间和成本。

绘制人机文本共同创作任务中交互的设计空间
大型语言模型 (LLM),例如生成式预训练 Transformer 3 (GPT-3) [ 3 ],因其生成文本内容的能力而引起了研究人员和从业人员的极大关注。ChatGPT 1 的迅速成功——推出仅两个月后月活跃用户就达到 1 亿,创下了历史上增长最快的消费者应用记录 2——不仅凸显了生成式 AI 在生成精确和个性化文本内容方面的潜力和能力,而且凸显了界面和交互在与 AI 通信中的关键作用。由于 ChatGPT 是针对对话任务进行了微调的 GPT-3 变体,因此技术基础保持相似;相反,主要区别似乎是人机交互范式的转变,
VRSketchIn:探索虚拟现实中 3D 素描的笔和平板电脑交互设计空间
摘要 虚拟现实 (VR) 中的素描可增强对 3D 体积的感知和理解,但目前是一项具有挑战性的任务,因为空间输入设备(例如跟踪控制器)不提供任何用于空中交互的支架或约束。我们介绍了 VRSketchIn,这是一款 VR 素描应用程序,使用 6DoF 跟踪笔和 6DoF 跟踪平板电脑作为输入设备,将不受约束的 3D 空中与受约束的 2D 基于表面的素描相结合。为了探索这种 2D(平板电脑上的笔)和 3D 输入(6DoF 笔)组合产生的可能性,我们提出了一组设计维度并定义了 VR 中 2D 和 3D 素描交互隐喻的设计空间。我们对设计空间内的现有技术进行分类,并在我们的原型中实现了笔和平板电脑素描的隐喻子集。为了更深入地了解哪些特定的

隐私选择的设计空间:迈向物联网中有意义的隐私控制
“通知和选择”是当今数据隐私保护的主要方法。有大量以用户为中心的研究,以提供效率的隐私通知,但对DE签署隐私选择的指导不足。最新的数据隐私法规在全球范围内建立了新的隐私选择要求,但是系统实践者很难实施合法合规的隐私选择,这些隐私选择也为用户提供有意义的隐私控制。我们基于以用户为中心的分析来构建一个设计空间,以选择人们如何在现实世界系统中行使隐私选择。这项工作贡献了一个概念框架,将隐私选择视为以用户为中心的过程,以及用于在其系统中设计有意义的隐私选择的分类法。我们还提出了一种用例,即如何利用设计空间来对现实世界中的隐私选择平台(物联网(IoT)助手)进行设计决策,以在物联网中提供有意义的隐私控制。
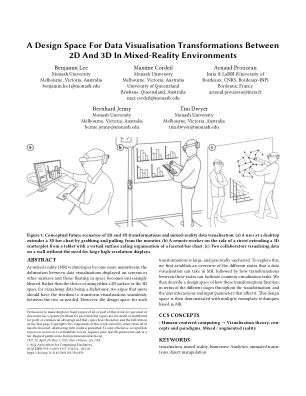
混合现实环境中 2D 和 3D 之间数据可视化转换的设计空间
在计算机图形学出现之前,抽象数据大多以 2D 形式表示,用于报告、书籍或海报的发布。同时,3D 表示仅限于空间数据的物理构造,如地理地球仪、化学、医学或建筑模型。具有合理图形能力的第一波台式计算机导致投射到 2D 屏幕上的 3D 数据表示激增。这可以说导致了 3D 图形的过度使用——例如 Tufte 和其他人非常讨厌的经典免费 3D 图表——早期对 2D 屏幕上 3D 可视化的研究证明了它们的局限性。此后,这导致信息可视化研究界在很长一段时间内围绕 2D 表示巩固信息可视化设计空间,以最佳方式安排 2D 屏幕。近年来,随着混合现实 (MR) 技术的兴起,我们需要重新考虑一些关于数据可视化“自然栖息地”的假设。混合现实 (MR) 耳机,例如 Microsoft HoloLens 2,终于实现了无线、强大的空间跟踪和具有合理视野的高分辨率立体渲染。这些耳机现在还可以了解其环境,映射房间中的表面并跟踪其用户的手势。我们可以渲染在环境中任何表面上明显投射的 2D 类图形,渲染从所述表面明显突出的 2.5D 类图形,或将它们悬浮在我们周围的 3D 空间中 - 所有这些都同样轻松且保真(图 2)。这项新功能为我们提供了沉浸式环境中数据可视化的新设计选择和可能性——也称为沉浸式分析 [ 10 , 41 ]。当然,我们应该继续以最佳方式可视化数据,无论是在 2D 表面还是在 3D 空间中。然而,借助 MR 提供的灵活性,我们可以考虑任何给定的可视化如何在两个环境(表面或空间)之间自由移动,以满足用户的需求。想象一下,只需用手抓住并拉动显示器中的 2D 可视化,即可将一些数据编码到第三空间维度(图 1a),从而将 2D 可视化暂时从显示器中挤出到 3D 中,或者从平板电脑中挤出可视化并将其悬浮在您面前的空间中(图 1b)。这些可视化还可以放置在任意表面上,模仿大型墙壁大小的 2D 显示屏,同时保留 3D 的灵活性(图 1c)。与此相反,我们还可以将 3D 可视化平面化为表面上的 2D,例如通过应用投影或创建横截面视图。在沉浸式环境中支持表面和空间之间的这些转换已被确定为沉浸式分析的重大挑战之一 [17]。虽然最近的工作(第 2 节)已经展示了涉及使用 2D 表面和显示器与 MR 结合进行数据可视化的应用,但我们特别关注可视化