XiaoMi-AI文件搜索系统
World File Search System越野跑

线图越野式 - 里普斯持续图,用于拓扑图表示学习
虽然消息传递图神经网络会导致信息丰富的节点嵌入,但它们可能无法描述图的拓扑特性。为此,节点滤波已被广泛用作使用持久图获得图的拓扑信息的一种尝试。然而,这些尝试面临着失去节点 - 床上用品信息的问题,这反过来又阻止了它们提供更具表现力的图表。为了解决这个问题,我们将重点转移到边缘效果上,并引入了一种新颖的基于边缘的持久性持续图,称为拓扑边缘图(TED),该图被数学证明可以保留节点嵌入信息以及包含其他拓扑信息。要实现TED,我们提出了一种基于神经网络的算法,名为“线图越vietoris-rips”(LGVR)持久图,该图通过将图形转换为其线图来提取边缘信息。通过LGVR,我们提供了两个模型框架,可以应用于任何传递GNN的消息,并证明它们比Weisfeiler-Lehman型着色更强大。最后,我们从经验上验证了模型在几种图形分类和回归基准上的出色性能。关键字:图形神经网络,持久图,拓扑数据分析,Weisfeiler-Lehman测试,越野透 - rips过滤

从RGB图像中的光谱特征的预测映射用于越野地形分析
摘要 - 准确识别复杂的地形特征,例如土壤组成和摩擦系数,对于基于模型的计划和越野环境中移动机器人的控制至关重要。光谱特征利用光吸收和反射的不同模式来识别各种材料,从而可以精确地表征其固有特性。机器人技术的最新研究探索了光谱的采用,以增强与环境的感知和相互作用。但是,安装这些传感器所需的巨大成本和精致的设置存在着广泛采用的强大障碍。在这项研究中,我们将RS-NET(RGB引入光谱网络),这是一种深层神经网络体系结构,旨在将RGB图像映射到相应的光谱签名。我们说明了如何将RS-NET与共同学习技术协同结合,以进行地形性质估计。初始结果证明了这种方法在表征广泛的越野现实世界数据集中的光谱特征方面的有效性。这些发现仅使用RGB摄像机强调了地形性质估计的可行性。
Air Traffic Engineering and Standards
首先道天线为仪表着陆系统的组成部分,它能够提 提供准确的方向指示及下降导航讯号,在正常或即使在统计的天气状况下,航机亦能安全地在跑道上着陆。 滑翔路径天线是安装在机场的仪表着陆系统的一个组成部分,提供精确的下降引导信号,以便在所有天气条件下飞机在跑道上安全着陆。
鉴定用于恢复抗越野癌细胞凋亡的新C翼抑制剂
1 CNR,INSERM,BIOSIT UAR 3480,US-S018,RENNES UNIXPY,F-35000 RENNES,法国; kathy_yaacoub@hotmail.com(k.y。); ulrich.jarry@univ-rennes.fr(U.J.)2 Inserm,OSS(OSS(OSSESESION WESERASION SIGNAMENG TOMPENGENT),UMR-S1242,CLCC EUGYUGèMarquis,Rennes University,F-35000,法国Rennes,F-35000; remy.pedeux@univ-rennes1.fr 3 CNRS,ICOA,UMR 7311,ErléansUniversity,F-45067 ENSE ENS,法国; pierre.lafite@univ-orleans.fr(P.L.); samia.aci@cnrs-orleans.fr(s.a.-s.); pascal.bonnet@univ-orleans.fr(p.b.); Richard.daniellou@agroparisech.fr(R.D.)*通信:thierry.guillaude@univ-rennes1.fr或tguillaude@kineta.us.us†现在的地址:Cosmétology,Agroparistech,Agroparistech,10 Rue Onard de vinci,F-45100 Erl f-45100 Erlerléples,法国法国。•目前的地址:Inrae,Agroparistech,Umr Micalis,Paris-Saclay University,F-78350 Jouy-en-Josas,法国。
越野重型应用中氢燃料电池的总拥有成本(TCO)分析 - 初步结果
性能指标引擎特定功率W/kg 158 1000 1000发电机组包括柴油发动机和交流发电机燃料存储系统特定能量kWh/kg 8.4 6.0 6.0 CAT C175-16,C175-20,C175-20 ESS ESS ESS WH/kg 200 200可能需要加固的燃料电池系统Btms w/kg w/kg gg gg w/kg gg gg w/kg kg gg 123 123,000年6月6日,00千kg (柴油)或生命周期(FCS)H 20,000 25,000 25,000 TBO:大修成本之间的时间指标4级或fcs $/kW 250 323 60 20%的4个修改引擎大修的津贴 Maintenance $/MWh 5.3 8.3 8.3 Reported as O&M, Includes SCR catalyst replacement Drivetrain Components Alternator $/kW 59 Included in Genset Rectifier $/kW 90 DC Link $/kW 1.5 DC-DC Converter $/kW 75 75 Need 2 for 2-WD drivetrain Inverter $/kW 75 75 75 Need 2 for 2-WD drivetrain AC Motor $/kW 120 120 120 120对于2-WD传动系统变速箱$/kW 70 70 70需要2对2-WD传动系统功率调节$/kW 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 6.25 5 3润滑$/kg $/kg/kg $/kg/kg/kg/kg 0.49报告为o&m,燃料成本量为5%的燃料成本(urea y 0.1%),5%的燃料(urea and oe y 5.18)参数经济寿命年15 15 15挽救价值的标价价格%23 23 23 23 23 23 FCS的零救助值和电池内部收益率(IRR)%7 7 7 7 7 7通货膨胀%2 2 2 2安装成本乘数1.3 1.3 1.3 1.3 1.3 1.3 30%安装附加费
莱曼,弗兰克;越野,丹尼尔; Zimmermann;迈克尔},title = {{{tosca4qc:Tosca自动化
摘要 - 量词计算引入了一种新的计算范式,该范式有望解决无法通过经典计算机效率解决的问题。因此,量子应用程序将越来越多地集成到经典应用中。要将这些复合应用程序带入生产中,需要进行自动部署和编排技术,以避免手动易行错误和耗时的过程。对于非量化应用程序,近年来已经开发了各种部署技术。但是,量子应用程序的部署目前与非量子应用程序显着不同,因此导致了用于部署量子应用程序的不同建模程序。为了克服这些问题,我们提出了TOSCA4QC,该TOSCA4QC介绍了两种部署建模样式,该模型基于拓扑和编排规范的云应用程序(TOSCA)标准(TOSCA)标准,用于自动化量子应用的部署和编排:(i)SDK规格模型的模型,以覆盖所有技术模型,以涵盖所有技术部署详细信息(II)技术的详细信息(II)详细信息(II)详细信息(II)详细信息(II)。原则。我们进一步展示了如何将现有的模型驱动开发(MDD)方法应用于将SDK-静态模型重新定为可执行的SDK特定模型。我们证明了原型实施的实际可行性,作为Tosca生态系统Opentosca的扩展以及IBMQ和量子模拟器的三个案例研究。索引术语 - Tosca,量子计算,部署自动化,建模,编排
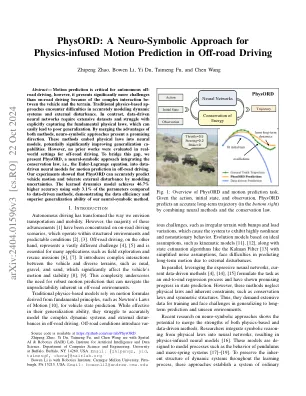
Physord:一种用于越野驾驶物理学运动预测的神经符号方法
摘要 - 运动预测对于自主越野驾驶至关重要,但是,由于车辆和地形之间的复杂相互作用,它比公路驾驶更大挑战。传统的基于物理的AP-在准确建模动态系统和外部干扰时会遇到困难。相比之下,数据驱动的神经网络需要广泛的数据集,并在明确捕获基本的物理定律方面挣扎,这很容易导致概括不良。通过合并两种方法的优点,神经符号方法提出了一个有希望的方向。这些方法将物理定律嵌入神经模型中,可能会显着改善概括性。但是,在实际世界环境中没有对越野驾驶的事务进行评估。为了弥合这一差距,我们提出了Physord,这是一种神经符号方法,将保护定律(即Euler-Lagrange方程)整合到数据驱动的神经模型中,以进行越野驾驶中的运动预测。我们的实验表明,物理学可以通过建模不确定性来准确预测车辆运动并耐受外部干扰。与数据驱动的方法相比,仅使用参数的3.1%,学到的动力学模型可实现46.7%的精度,证明了我们的神经符号方法的数据效率和出色的概括能力。

一个分布式降雨跑模型,用于调查气候变化对欧洲阿尔卑斯山河流洪水的影响
为此,主要思想是使用“ Tuwmodel”的概念水文模型的“新版本”来说明水和洪水传播的巴辛间传播(从上游流域到下游流域),通过实施基于NASH-Cascade模块的引入新路由程序。在测量站点使用不同的校准策略来估计最佳模型参数。然后将基于机器学习的区域化方法(Hydropass)应用于在Ungaiged地点推断模型参数以进行水文流量预测。