机构名称:
¥ 1.0
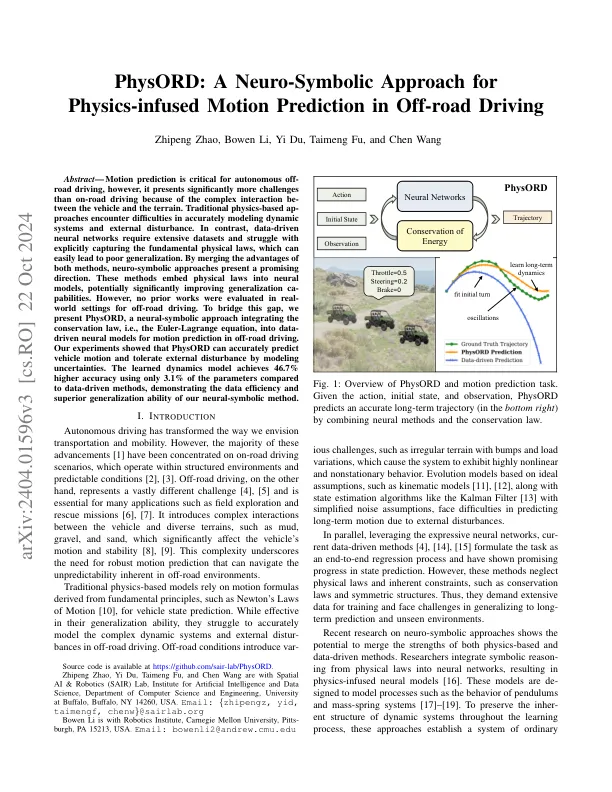
摘要 - 运动预测对于自主越野驾驶至关重要,但是,由于车辆和地形之间的复杂相互作用,它比公路驾驶更大挑战。传统的基于物理的AP-在准确建模动态系统和外部干扰时会遇到困难。相比之下,数据驱动的神经网络需要广泛的数据集,并在明确捕获基本的物理定律方面挣扎,这很容易导致概括不良。通过合并两种方法的优点,神经符号方法提出了一个有希望的方向。这些方法将物理定律嵌入神经模型中,可能会显着改善概括性。但是,在实际世界环境中没有对越野驾驶的事务进行评估。为了弥合这一差距,我们提出了Physord,这是一种神经符号方法,将保护定律(即Euler-Lagrange方程)整合到数据驱动的神经模型中,以进行越野驾驶中的运动预测。我们的实验表明,物理学可以通过建模不确定性来准确预测车辆运动并耐受外部干扰。与数据驱动的方法相比,仅使用参数的3.1%,学到的动力学模型可实现46.7%的精度,证明了我们的神经符号方法的数据效率和出色的概括能力。
Physord:一种用于越野驾驶物理学运动预测的神经符号方法
主要关键词


相关文件推荐