XiaoMi-AI文件搜索系统
World File Search System路基
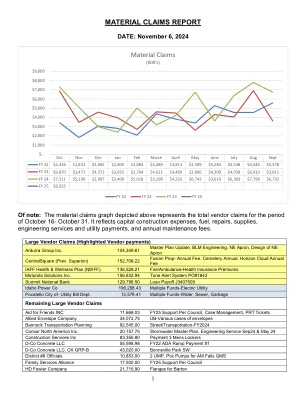
材料索赔报告
Health West Inc 11,694.99 HW Mental Health Intermountain Claims (Boise - Check) 28,221.94 W/C 支票账户 Keller Associates Inc 83,664.51 工程服务 - 排水施工 Land View Inc. 13,735.60 WPC-硫酸铝供应 Mickelsen Construction 41,788.17 路基和沥青 Naviant Inc. 17,184.40 SWM Onbase MT/EXSUP1/SLA Neptune INC 20,238.00 仪仗队制服 Parkland USA 55,330.56 燃料、中级燃料、柴油、煤油 Pocatello 免费诊所 21,048.00 普通基金 - 理事会邮政局长提供的 FY23 支持 - 批量邮件 14,000.00 报销一流预付费 Pro Builders Inc 30,679.99 Hawthorne & Jensen 行人安全 Pay Pro Consulting Inc 25,355.00 任务 1A、2A、3D、分包服务 Scott's Sprinkler Systems 27,208.62 Legay Park Sprinklers SEICAA 12,000.00 UB-向 SEICAA 报销 老年活动中心 35,000.00 理事会 FY25 支持 Thatcher Chemical Company 15,379.00 水-氯、氯容器 Turfco 17,725.60 新骑式割草机 联合太平洋铁路公司 10,640.11 Center St. 人行道计划 Visit Pocatello Inc. 15,000.00 理事会 FY25 支持 Young Chevrolet Company 36,121.00 2024 Cheverolet Colorado Zima Corp 22,605.00 WPC 渠首工程零件
Microsoft Word - Det_HB_Aug2007_pt1__Larry_email8_30_07_.doc
图表列表 图 1。组合技术传感器。(照片由瑞士 U ZNACH 的 ASIM T ECHNOLOGIES 提供)。.................................................................................................................................... 3-3 图 2。单车道和多车道高速公路的路管配置。(照片由俄勒冈州塞勒姆的 T IME M ARK , IN C . 提供)。........................................................................................................... 4-2 图 3。JAMAR TRAX-III 计数器的前面板显示。(图片由宾夕法尼亚州霍舍姆的 JAMAR T ECHNOLOGIES, IN C. 提供)...................................................................................................... 4-3 图 4。感应环路检测器安装的主要组件............................................................................................. 4-4 图 5。铁质金属车辆中的磁偶极子引起的地球磁场中的磁异常。................................................................................................................................... 4-7 图 6。当车辆进入并穿过磁传感器的检测区时,地球磁场的畸变。(绘图由 N U-M ETRICS,UNIONTOWN,PA 提供)。4- 8 图 7。双轴和三轴磁通门磁力计传感器。............................................................................. 4-10 图 8。感应磁力计传感器。................................................................................................ 4-11 图 9。安装在路基中的铝槽中的 V IBRACOAX 压电传感器。(图纸由 IRD, I NC ., S ASKATOON , SK 提供)。................................................................................ 4-13 图 10。安装在路基中的 ROADTRAX 压电 BLC 传感器(ROADTRAX,1995-1996)。.................................................................................................... 4-14 图 11。B 端板传感器。(照片由 IRD, IN C., SASKATOON, SK 提供)。.................... 4-23 图 12。B 端板或 WIM 系统称重传感器(典型)............................................................................. 4-24 图 13。LINEAS 石英传感器(图纸由瑞士 INTERTHUR 的 K ISTLER INSTRUMENTS AG 提供)。带有全长压电传感器的 WIM 安装 ...................................................................................................... 4-25 图 14。................................................................................................................................. 4-26 图 15。电容垫传感器连接到数据分析设备。(照片由 L OADO M ETER , C ORP ., BALTIMOER , MD 提供)............................................................................................. 4-28 图 16。三线视频图像处理器。................................................................................................... 5-3 图 16。视频图像处理器(也称为机器视觉处理器)........................................ 5-3 图 17。视频图像处理器(续)。................................................................................................ 5-3 图 18。用于车辆检测、分类和跟踪的概念图像处理。(K LEIN , 2006) .................................................................................................................................................... 5-5 图 19。四个 VIP 和电感环路检测器的车辆数量比较 ........................................................................ 5-9 图 20。车辆速度与 .照明 VIP 测试结果 ............................................................................................. 5-11 图 21。车辆数量与 .照明 VIP 测试结果 ............................................................................................. 5-11 图 22。车辆数量与 .速度 VIP 测试结果 .................................................................................. 5-12 图 23。微波雷达操作。......................................................................................................... 5-14 图 24。使用 FMCW 微波存在检测雷达进行速度测量 ........................................... 5-15 图 25。FMCW 微波存在检测雷达的侧装配置说明多车道车辆检测。(照片由加拿大多伦多 EIS 提供)...................................................................................................................................... 5-16 图 26。恒定频率波形...................................................................................................................... 5-17 图 27。多普勒微波雷达传感器。................................................................................................ 5-17 图 28。存在检测微波雷达传感器 ........................................................................................ 5-18 图 29。激光雷达光束几何形状。(绘图由 OSI Laserscan 公司提供,佛罗里达州奥兰多).......... 5-18 图 30。激光雷达传感器。........................................................................................................................... 5-18 图 31。被动红外传感器 ............................................................................................................................. 5-20 图 32。车辆和路面发射和反射能量 ............................................................................................. 5-21 图 33。被动红外传感器中的多个检测区域配置 ............................................................................. 5-21 图 34。超声波传感器 ............................................................................................................................. 5-25 图 35。超声波测距传感器的安装。(由密歇根州安娜堡的微波传感器公司提供)...................................................................................................................................... 5-26 图 36。声学阵列传感器。......................................................................................................................... 5-29
第 6F-1 节 - 路面底基设计和施工
路面系统通常由三层组成:准备好的路基、底基层和路面。本节将讨论底基层的正确设计和施工。底基层是位于路面正下方的骨料层,通常由碎骨料或砾石或再生材料组成(有关更多信息,请参阅第 6C-1 节 - 路面系统)。虽然“基层”和“底基层”这两个术语有时可互换使用,指路面的地下层,但基层通常用于沥青路面,主要用作结构载荷分布层,而混凝土路面中使用的底基层主要用作排水层。骨料底基层通常由碎石组成,碎石由能够通过 1 1/2 英寸筛网的材料组成,其成分颗粒大小从 1 1/2 英寸到粉尘不等。该材料可以由原生(新开采的)岩石或再生沥青和混凝土制成。路面底基层的作用是提供排水和稳定性,以延长路面的使用寿命。现在大多数路面结构都包含地下层,其部分功能是排出可能对路面寿命有害的多余水(参见第 6G-1 节 - 地下排水系统)。但是,必须仔细选择和正确构造透水基层的骨料材料,以提供不仅透水性,而且还提供均匀的稳定性。正确的施工和 QC/QA 测试操作有助于确保底基层的良好性能。过度压实会改变级配并产生额外的细粒,这可能会导致渗透性低于实验室测试确定的渗透性并用于路面系统设计。然而,从高稳定性优化结构贡献与为路面材料提供足够排水的需要仍然是一个争论点。本节的重点是提供有关选择适当的底基层材料、最佳施工实践和合适的 QC/QA 测试方法的指导。B. 粒状底基层

机器学习用于指导隧道施工
符号列表 α 岩体中薄弱面的方向。 β g , β l 分别为粒子群优化算法的全局和局部学习参数。 γ 土壤单位重量。 γ SVM 支持向量机核系数。 ϵ 高斯噪声。 ζ(x) 输入值 x 的高斯隶属函数。 θ 隧道掘进机俯仰角。 κ 土壤卸载-重新加载曲线的斜率。 μ(x) 高斯过程的平均向量。 ν l 隧道衬砌的泊松比。 ν s 土壤的泊松比。 ρ 1 , ρ 2 两个随机初始化的向量,其条目范围在 0 和 1 之间。 σ 高斯函数的标准偏差。 ϕ′ 土壤摩擦角。 ψ′ 土壤扩张角。 A 隧道掘进机的表面积。 a 使用模糊 c 均值聚类算法控制系统模糊性的参数。AR 隧道掘进机推进速度。b 可调偏差矢量。BI 岩体脆性指数。C 管串收敛。c 高斯函数均值。c′ 土壤黏聚力。CP 刀盘功率。CM 施工方法。D 隧道掘进机直径。dj 数据聚类中心 j。D c 隧道掘进机刀盘直径。DPW 弱面间深度。E l 隧道衬砌杨氏模量。E s 土壤杨氏模量。EI 抗弯刚度。EPB 土压平衡。f ( x ) 表示数据底层结构的潜在函数。FPI 场穿透指数。g* 粒子群优化算法的全局最佳历史位置。GSI 地质强度指数。H 隧道覆盖深度。H w 隧道掘进机上方地下水位高度。 it, il 土面沉降曲线横、纵向拐点。J FCM 模糊c均值聚类目标函数。JF 隧道掘进机顶进力。K 侧向土压力系数。ks 土的渗透性。k sub 路基反力模量。k ( x , x ′) 输入对x和x′的协方差函数。

LFMP - 佩皮尼昂里韦萨尔特 - DIRCAM
北通用航空停机坪处过桥设 K 型跑道。K 型跑道宽度:从 C 处为 23 米,至桥后为 110 米。北通用航空停车场桥上的 TWY K。 K 路基宽度从 C 处开始为 23 米,至桥后为 110 米。 TWY D 禁止 MTOW > 5.7 吨的 ACFT 使用。对于 MTOW > 5.7 吨的 ACFT,禁止 TWY D。 TWY F 和 P 因 ACFT 地面行动而关闭。 F 和 P 高速公路禁止飞机通行。 TWY L: TWY L: - 禁止翼展大于或等于 52 米和/或主起落架总宽度大于或等于 14 米的 ACFT 飞行, - 禁止翼展大于或等于 52 米和/或主起落架总宽度大于或等于 14 米的飞机飞行, - - 在 15/33 跑道上进行 IFR 交通时,禁止翼展大于 46 米的飞机飞行。如果在 15/33 跑道上进行 IFR 交通,则禁止翼展 > 46 米的 ACFT 使用。 THR 15:半转弯限制于类别低于或等于“代码 C”的 ACFT,并且仅当 TWY A 不能使用时。阈值 15:掉头仅限于小于或等于“代码 C”类别的飞机,并且仅当 TWY A 不可用时才可以。 THR 33:半转区域。阈值 33:掉头区域。跑道 15/33 的缩短路肩位于跑道 D 和跑道入口 15 之间。跑道 15/33 的缩短路肩位于跑道 D 和跑道入口 15 之间。跑道 C、D、K、U、P 的缩短路肩:中速滑行。 C、D、K、U、P 路段路肩较窄:以中速行驶。在 TWY U 上,由于运营原因,跑道义务标志之间的距离比正常情况下要大。在 TWY U 上,由于运营原因,跑道义务标志之间的间距大于标准。
计划审查清单
添加 Superpave 混合设计等级。所有沥青路面均使用公制 Superpave 命名法,例如 9.5 mm Superpave、12.5 mm Superpave。ο • 典型路段应显示适用于每个路段的站点。站点不应重叠或跳过。应在适用时显示超高路段。每层路面都应标有深度和材料类型。• 在拓宽和重建项目中,典型路段应指示坡度或“匹配现有坡度”。• 检查前坡、沟渠深度、总体尺寸等。ο 如果有一条没有路缘的人行道,则人行道应距离道路至少 5 英尺。• 所有带有人行道的项目都应提供路缘切割坡道。索引应根据需要包括 GA 特殊细节 A1、A2、A3 和 A4。路缘切割坡道应按施工计划中的类型显示和标记。所有要求的位置都应显示可检测的警告。 • 路缘和排水沟部分应标明类型和尺寸。超高路段高侧的路缘和排水沟应与道路的方向和坡度相同。 • 检查所有注释和细节的准确性和必要性 • 人行道和景观美化的安装可以在地役权上进行。挖填斜坡、渠道和沟渠可以在地役权上建造。 • 残疾人停车位的位置应在计划中显示。放置残疾人停车位时,请记住通道需要可通往人行道,通常通过使用不能占用任何通道区域的路缘坡道。 • 人行横道 20 英尺范围内没有停车位。 • 闪光信号、停车标志、让行标志或交通控制信号 30 英尺范围内没有停车位。 • 检查是否需要增加减速车道或加速车道,要求 50' 锥度和 150' 行车道。 • 还要检查视距问题。 • 住宅检查是否需要任何类型的车道涵洞管道,通常最小 18 英寸。 • 车道入口的转弯半径因县而异,工业区为 35 英尺,商业区为 25 英尺,住宅区为 5 英尺 • 所有新入口都必须有 8 英寸厚的混凝土护堤,3500 PSI 覆盖在压实的路基上

武縄 聡 博士(神経科学) 博甲第 11082 号 令和 6 年 3 月 25 ...
为了澄清控制雄性小鼠社会偏好的神经回路,Takeawa Satoshi使用光遗传学和化学遗传技术来检查雌激素β受体(ERβ)表达细胞的操纵的影响,这表达了内侧杏仁核(MEA)(MEA)对雌性小鼠的偏好。摘要如下: 在第1章中,作者总结了性类固醇激素对雄性小鼠社会偏好的影响,作为基于先前研究的本文的背景。 Here, the authors state that male mice can identify females in estrus that are suitable for sexual behavior based on olfactory information, and generally prefer females (RF) over non-estrus (XF) and other male individuals (IM), but prior studies have shown that when the ERβ gene of MeA is missing, preference between RF and XF, that is, preference based on female estrus, is inhibited, while preference between RF and IM, that is, preference based on gender, is not inhibited.作者指出,先前研究的结果仅指ERβ蛋白的功能,并且尚未阐明基于发情状态的女性偏好的神经回路基础。考虑到这些背景,作者指出,本文的总体目的是了解集中在MEA背面的ERβ阳性神经元如何调节雄性小鼠的两种偏好:基于女性的偏好和基于性别的偏好。在第2章中,作者解释了一般程序,并同时创建了ERβ-ICRE小鼠应变,这对于实现上述目标至关重要,使用CRISPR-CAS9系统。使用该小鼠将使实验能够在社交偏好测试中专门记录和操纵MEA-ERβ细胞。 在第3章中,作者描述了将纤维光度法应用于ERβ-ICRE小鼠的实验(实验1和2)。首先,在实验1中,作者透露,在“女性雌激素”偏好测试中记录MEA-ERβ细胞的神经活性,该测试在搜索RF时强烈激活MEA-ERβ细胞,并指出MEA-ERβ细胞会特别响应RF异常和显示出偏好的伴侣的可能性。接下来,在实验2中,作者指出,MEA-ERβ细胞专门用于RF。