XiaoMi-AI文件搜索系统
World File Search System轴线

NeoFordist技术变革和生产性重组。对其领土含义的首次思考
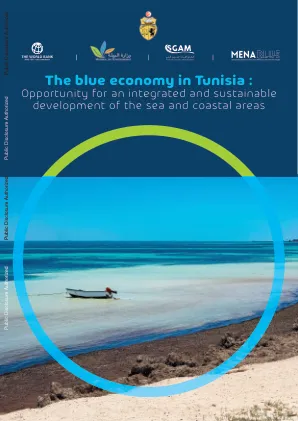
这项工作分析了资本主义发展阶段的逐步转变,尤其是在第二个职位的组织方式中,由于新的政治,社会,经济和技术要素似乎是在重新开始的资本扩张周期的开始。 div>该信息被转变为新的科学发现和技术应用的目标,并在生产仪和消费模式中系统地传播,似乎是新兴范式的轴线。 div>在商业和工业组织中,这是在灵活性上翻译而来的,这激发了工厂组织及其与不断增长的国际经济环境的关系的重新思考。 div>

漂移角理论应用于船舶操纵模型。
船舶的六个自由度 ................................................ ..船舶轴线相对于 Eanh 轴线的相对位置 .................................. .涌浪力与涌浪速度之间的图形关系 阻力曲线的图形表示 ................................ .螺旋操纵的图形表示 ................................ ..舵角和角速度图的绘制:(A)动态稳定船舶 ............................................................. ..舵角和角速度图的绘制:(B)动态不稳定船舶 ............................................................. .. GZ 曲线的图形表示:(A)静态稳定船舶 ............................................................. .GZ 曲线的图形表示:(B)静态不稳定船舶 ................................................................ .. 推力曲线的图形表示 ................................................ ..动态稳定船舶的 Kemf Zig zag 机动 动态不稳定船舶的 Kemf Zig zag 机动 ............................................................................................................. .阻力曲线的图形说明 ............................................................................. .比例模型阻力曲线的图形表示 .. .. 纵向拖曳时舵处于攻角的模型方向 ............................................................................. ..显示测量的偏航力矩和舵角的图表 ............................................................................................. .显示测量的摇摆力和舵角的图表 ...... .比例模型阻力曲线图 ................................ ..攻角模型方位图:(A)舵与模型中心线对齐 ........................ .攻角模型方位图:(B)舵与拖曳水池中心线对齐 ........................ .. JL/测量比例模型图示:偏航力矩与摇摆速度图 ........................ .测量比例模型图示:摇摆力与摇摆速度图 ................................ ..平面运动机构图示 ................................ .船首和船尾之间相位差为零的模型轨迹 ............................................................................................. .PM M 下模型的正弦路径...................................... ..模型的旋转臂运动................................................ ..显示测量的摇摆力与角速度的关系的图表............................................................................................. .显示测量的偏航力矩与角速度的关系的图表............................................................................................. ..
权力下放框架内省级战略发展和实施计划编制指南
发展规划按其覆盖的地理范围分为不同的层次。有国家规划、区域(省)规划(覆盖范围大于城市(一个省或一组城市或几个省))、城市级规划(城市/市政当局)和详细规划(覆盖城市的一部分)。不同规划层次以综合方式相互作用,上层规划为下层规划路线,下层规划在制定和实施规划的实体的权限范围内制定实地操作计划。因此,国家级规划确定了引领下层发展进程的主要目标和轴线,而地方级规划(市政和详细规划)为更高层次的地方环境发展提供信息,区域级规划是国家级规划和地方级规划之间的纽带。
人机协作的工具和方法 - HAL
摘要:人机自主团队 (HAT) 范式最近出现,用于设计混合团队,其中人类操作员与自主人工智能体合作。一个主要的挑战是将这个自主代理转变为一个更好的队友,使其能够与人类更多地相互依赖。所呈现的工作探索了两个轴线,得到了工业合作(在运输和工业系统领域)、学术伙伴关系(特别是南澳大利亚)和博士生指导的支持。第一个轴涉及认知状态的监控,以便使机器具有检测人类遇到的困难的能力。为了回答这个问题,提出了一种全局方法,从生理和行为数据的融合角度对操作员的心理负荷进行分类。然后通过研究认知控制的概念及其与心理负荷的关系,探索人类实施的调节机制。
2021 年电动航空
电动机相对于内燃机的优势在于效率更高。活塞发动机和涡轮发动机所用燃料中的大部分势能都转化为热量。电动发动机仅因电阻而损失一小部分势能。这意味着电动飞机飞行时可将 90% 以上的势能传输至动力传动系统的轴线,而涡轮螺旋桨飞机在低空的势能为 20-25%,在高空的效率高达 35%。涡扇发动机的效率相当高,但与电动发动机还是相差甚远。2 与活塞发动机和涡轮发动机相比,电动发动机从零加速到最大速度也快得多。另一个好处是维护成本更低,因为与化石燃料发动机相比,电力传动系统在运行过程中磨损的运动部件更少。
2030 年赋能该部门:- 摩尔堡
ADCS。ADCS 是 D-CDTF 的锚点。它为师提供强大而致命的全天候 R&S 能力。从侦察角度来看,ADCS 为师长提供了争取信息的能力,帮助回答优先情报要求,并在不投入 BCT 或其他资源的情况下发展局势。ADCS 拥有装甲、机动性和火力,可以在战场上执行大量关键侦察任务。ADCS 可以通过在师主力到达之前战斗并评估关键的渡河地点或验证桥梁适用性来更早地影响师的前进轴线。ADCS 还可以对敌人的障碍物和防御进行更深入的侦察,识别接缝和间隙,为 BCT 推荐穿透点——所有这些都为师长在战斗早期提供了更多的选择和决策空间。

第10部分小型钢船船体结构及设备
干舷时船舶长度()为从龙骨顶端量起的85%最小型深水线处首柱前侧至尾端船板后侧的长度(以米为单位)的96%,或为该水线上首柱前侧至舵杆轴线的长度(以米为单位),取较大者。但是,当首柱轮廓在85%最小型深水线以上凹陷时,该长度的前端点应取首柱轮廓最后点在该水线上的垂直投影。对于无舵杆的船舶,干舷船舶长度为从船首前侧到船尾壳板后侧测量的长度的 96%,该长度位于从龙骨顶部测量的最小型深的 85% 处的水线上。测量此长度的水线应与 108 中定义的载重线平行。