XiaoMi-AI文件搜索系统
World File Search System逻辑关系
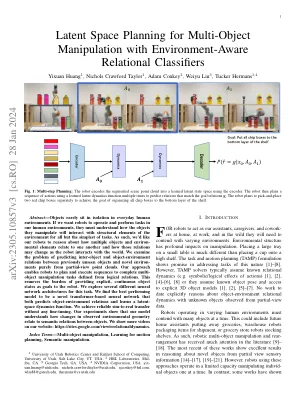
通过环境意识的关系分类器进行多对象操作的潜在空间计划
摘要 - 对象很少在日常的人类环境中孤立地坐着。如果我们希望机器人在人类环境中操作和执行任务,他们必须了解他们操纵的对象将如何与最简单的任务相互作用。因此,我们希望我们的机器人推理多个对象和环境元素如何相互关系,以及这些关系在机器人与世界互动时可能会发生变化。我们研究了以前看不见的对象和新颖的环境之间纯粹来自部分视图点云之间预测目标间和对象环境关系的问题。我们的方法使机器人能够计划和执行序列,以完成由逻辑关系定义的多对象操纵任务。这消除了提供明确的,连续的对象作为机器人目标的负担。我们为此任务探索了几种不同的神经网络体系结构。我们发现最佳性能模型是一个基于新颖的变压器神经网络,既可以预测对象环境关系,又可以学习潜在空间动力学功能。我们实现了可靠的SIM转移传输,而无需进行任何微调。我们的实验表明,我们的模型了解观察到的环境几何形状的变化如何与对象之间的语义关系有关。我们在网站上显示更多视频:https://sites.google.com/view/erelationaldynamics。

Plan2Dance:基于音乐的舞蹈编排
舞蹈机器人领域吸引了众多领域的关注。例如,索尼推出了一款名为 QRIO 的人形机器人(Geppert 2004),它可以通过模仿人类的舞蹈以高度协调的方式与多个单元一起跳舞。Nakaoka 等人探索了一种动作捕捉系统来教机器人 HRP-2 跳日本传统民间舞蹈(Nakaoka 等人 2005)。尽管之前的系统取得了成功,但它们通常要么局限于一组预先定义的动作(伴随着音乐),要么根据外部刺激表现出很小的变化。为了提高舞蹈的变化性,Bi 等人提出让有腿的机器人以多样化的方式与音乐同步跳舞(Bi 等人 2018)。他们根据音乐的节拍从舞蹈动作库中挑选动作,创作了一种舞蹈编排。舞蹈动作包括各种踏步和基本动作。从库中挑选动作的过程由马尔可夫链定义,它取决于先前挑选的舞蹈动作和当前音乐节奏。在那些基于概率图模型的方法中,由于概率模型在表示舞蹈动作之间的逻辑关系方面的局限性,通常会选择与先前动作不合理的动作。在本演示中,我们设计了一个名为 Plan2Dance 的系统,以基于音乐创作舞蹈编排。通过考虑动作的时间要求,基于基本舞蹈动作的关系构建了一组动作模型(以 PDDL(Fox and Long 2003)语言的形式)。
009-111 日期:2024 年 10 月 1 日 类别:I 1. 范围
NAVSEA 标准项目 FY-27 项目编号:009-111 日期:2024 年 10 月 1 日 类别:I 1.范围:1.1 标题:非 CNO 可用性的时间表和相关报告;提供和管理 2.参考:2.1 S9AA0-AB-GOS-010,水面舰艇 (GSO) 大修通用规范 3.要求:3.1 为工作包制定初始综合生产计划 (IPS),以反映可用性的实现方式。IPS 必须:3.1.1 将每个工作项目安排到工作活动级别,列出每个工作活动的开始和完成日期以及持续时间。3.1.1.1 为 IPS 中的每个工作活动分配一个简短的标题,以描述工作活动的性质、系统和所涉及的设备或机械。3.1.1.2 整合所有提供的改装安装团队 (AIT)、政府签约的第三方维护提供商、船舶部队、商业工业服务 (CIS) 和舰队维护活动 (FMA) 工作。3.1.2 安排关键事件和里程碑。3.1.2.1 在承包商的调度软件中为每个工作活动分配适当的前任和后任关系,以建立计划工作活动之间的逻辑关系。每个活动必须至少有一个前任和一个后任,关键事件开始可用性(可能没有前任)和关键事件完成可用性(可能没有后任)除外。3.1.3 关键路径和控制工作项目。3.1.4 第 3 阶段至第 6 阶段所有必需测试的预定开始和完成日期。测试阶段定义在 2.1 的第 092 节中。

可再生能源初创企业和创业
摘要:可再生能源技术的进步,特别是太阳能、风能、储能和电网集成解决方案的进步,正在加速该领域初创企业的增长。尽管前景光明,但可再生能源初创企业面临着多种风险,包括技术、监管、财务和市场风险。本文对与可再生能源领域创业和初创企业发展相关的投资问题和风险相关的科学出版物进行了文献计量分析。经过对数据集进行多级过滤后,研究基础包括 2005-2023 年 232 位科学家的 82 篇出版物,由 Scopus 索引,使用的分析工具是 Biblioshiny 和 Excel。2005-2016 年,出版物数量每年以 10.47% 的速度增长,2006、2007 和 2016 年达到峰值;2017-2023 年,论文数量增加(依赖性用三次多项式趋势描述)。本文研究了可再生能源初创企业和企业家精神的投资和风险这一主题的 3 种不同类型的三域图:1)“参考文献 - 作者 - 关键词”,2)“国家 - 机构 - 作者”,3)“作者 - 来源 - 关键词”。对在该领域知识传播中贡献最大/周期性但值得注意/最小的科学期刊进行了定量和定性分析,根据本地和全球影响力水平分析了前 10 名作者和论文,确定了最强大的研究网络(基于联合引文分析结果),包括作者和国家,并根据其科学家的研究成果量和这些作品的引用强度确定了领先的国家。构建最常用关键词云使我们能够确定优先研究主题领域,并分析研究领域中不同主题块之间的结构和逻辑关系。通过多重对应分析(因子分析)和纵向专题图分析,对该领域的科学景观进行聚类,并识别出各个主题的演变变化和相互依赖关系。

Ullah, M.、Gopalraj, SK、Gutierrez-Rojas, D.、Nardelli, P.、Kärki, T. (2023)。智能工业热解Pro的物联网框架和要求
摘要。累积的碳纤维增强聚合物 (CFRP) 复合材料废料需要得到有效处理。到目前为止,最有效的热基回收技术,即热解,在英国和德国等发达国家已呈指数级增长,以实现工业规模。通常,即使是最轻微的错误也会导致如此大规模的操作环境(例如,> 1 吨/天的操作能力)中的不良结果和工作流程延迟。现有的半自动化和在某些情况下完全自动化的工厂应不断更新,以适应不同类别和体积的 CFRP 复合材料废料。为了克服此类研究差距和不精确的人工错误,提出了基于物联网 (IoT) 的框架。本文研究了基于物联网的框架在热解过程中回收 CFRP 复合材料废料的理论实现,以基于信息物理系统的原理管理该过程。所提出的框架由传感器和执行器组成,它们将用于收集数据并与中央管理进行通信,中央管理构建为一个平台,该平台将表达和操纵数据以满足回收过程的要求,并通过物理实体之间的逻辑关系进行计算建模。在这种情况下,管理单元可以是可控制的,也可以是远程监控的,以增加工厂的运行时间。我们的目标是提出一种可扩展的方法来改进回收过程,这也将有助于未来处理回收碳纤维的决策。具体来说,这项研究将超越该领域的最新技术,通过 (i) 自动计算废物的质量并调整运行时间、温度、大气压力和惰性气体流量(如果需要),(ii) 再生热量,以便在第一批回收后,高热值的树脂将被燃烧并释放能量,其产生的热量需要被困在炉内,然后再生到系统中,以及 (iii) 降低能耗并加快工艺流程时间。总之,提出的框架旨在提供用户友好的控制和温度监控,从而可以提高整个过程的效率,并避免可能的过程关闭,甚至通过热解反应器中的受控气氛形成焦炭。

可靠性分析具有不同开关的温暖待机系列平行系统和生命周期的寿命
已广泛研究了系统可靠性,以确保系统的安全和操作。保持高性能或可用性的性能通常是必不可少的,而冗余是一种有效的技术,它是方便的操作和短时间内的。冗余方法已在各种关键基础架构中用于提高系统可靠性[13,35,43,45]。转换开关在冗余系统中起重要作用。开关故障即使系统元素正在运行,也可以影响系统的可靠性。因此,已经在系统中考虑了不完善的转换开关,并且已经由许多学者研究[17,34,36]。温暖的待机是提高应用程序可靠性的实际冗余技术之一。基于概率理论的温暖待机系统的可靠性分析已被许多学者(例如她和Pecht [32],Li等人)广泛研究。[19],Yuan和Meng [40],依此类推。尽管事实证明概率理论对系统可靠性分析有效,但我们需要长期累积频率才能近似实际值,以估算元素寿命的概率分布,这意味着统计数据需要大量观察数据。实际上,由于技术或经济的困难,我们通常无法准确获得完整的数据。使用概率理论处理系统可靠性存在局限性。在1965年,扎德[41]提出了模糊理论,并定义了一些模糊集的概念。在1975年,考夫曼[15]将模糊理论引入了可靠性工程。模糊理论在理论和工程学中都有一般应用。例如,模糊系统的可靠性[12,14,16,31],图片模糊编号[2],模糊软图[3],模糊逻辑关系[20]等。尽管概率理论和模糊理论已广泛应用于可靠性分析中,但刘[22]声称某种不确定性既不是随机性也不是模糊性。为了处理人类的不确定性现象,不确定性理论于2007年建立[22],并于2010年对其进行了重新构建[24]。如今,不确定性理论已应用于不同的领域,例如不确定的可靠性分析[8、11、28、37、42、44、46],不确定的优化[38],不确定图[21],不确定的积分[39],不确定的[39],不确定的序列[5]等。

基于 CLIPS 的脑肿瘤诊断专家系统
巴勒斯坦加沙艾资哈尔大学 摘要:脑肿瘤给现代医疗保健带来了重大挑战,准确及时的诊断对于确定适当的治疗策略至关重要。近年来,人工智能取得了重大进步。基于规则的专家系统(if-then 规则系统)已成为脑肿瘤诊断临床决策的一种有前途的方法。在本文中,我们介绍了“基于 CLIPS 的脑肿瘤诊断专家系统”,该系统利用一组 14 条 if-then 规则来诊断脑肿瘤,可能出现三种结果:1) 确认脑肿瘤的诊断,2) 考虑脑肿瘤转移的可能性,3) 考虑脑肿瘤的可能性。我们的专家系统提供了一个用户友好的界面,使用户能够选择症状并根据提供的信息获得诊断。本文讨论了专家系统的开发、实施和评估,强调了其在临床环境中促进脑肿瘤诊断和决策的潜力。此外,我们还提供了一份文献综述,将我们的专家系统置于基于规则的脑肿瘤诊断专家系统的更广泛背景下,研究其有效性、局限性和挑战。 关键词:脑肿瘤诊断、基于 CLIPS 的专家系统、临床指南、规则开发、人工智能、AI、专家系统、诊断结果 1. 简介:脑肿瘤是一种复杂的医疗状况,需要准确及时的诊断才能确定最合适的治疗策略。人工智能的进步导致了专家系统的发展,专家系统有可能支持临床决策并简化诊断过程。基于规则的专家系统(特别是基于 if-then 规则的系统)在脑肿瘤诊断领域受到越来越多的关注。本文介绍了“基于 CLIPS 的脑肿瘤诊断专家系统”,这是一种使用一组 14 条 if-then 规则诊断脑肿瘤的新方法,可能产生三种结果:1) 确认脑肿瘤诊断,2) 考虑脑肿瘤转移的可能性,3) 考虑脑肿瘤的可能性。专家系统也称为知识型系统或规则型系统,是旨在模拟特定领域人类专家的知识和决策能力的计算机程序。这些系统利用包含事实、规则和启发式方法的知识库来提供专家级建议和解决问题的能力。知识库由领域专家创建,他们将自己的专业知识编码为专家系统可以理解和利用的一组规则和逻辑关系(Jackson,1999 年)。专家系统的概念出现于 20 世纪 70 年代的人工智能 (AI) 领域,并在 20 世纪 80 年代和 90 年代得到了广泛的关注和发展。专家系统旨在通过对现有知识进行逻辑推理来解决复杂问题并做出明智的决策。它们在人类专家拥有专业知识和经验的领域表现出色,这些知识和经验可以编纂成一套规则或算法。专家系统已应用于医学、金融、工程和制造业等各个领域(Giarratano & Riley,2004 年)。专家系统的主要优势在于即使在没有人类专家的情况下,它们也能够提供一致、可靠和高效的决策过程。它们可以分析大量数据,评估多种选择,并根据预定义规则和逻辑推理生成建议。然而,专家系统也有局限性。它们依赖于知识库的准确性和完整性,并且可能难以应对超出其预定义规则的新情况或不熟悉的情况。此外,维护和更新知识库可能具有挑战性,需要与领域专家持续合作以确保其相关性和准确性(Giarratano & Riley,2004)。 CLIPS(C 语言集成生产系统)是一种基于规则的编程语言和开发环境,广泛用于开发专家系统和其他基于知识的应用程序。 它最初由 NASA 于 20 世纪 80 年代初开发,现已成为最受欢迎和广泛采用的专家系统工具之一。 CLIPS 是一个开源软件包,提供了一组丰富的功能来创建和操作基于规则的系统(Giarratano & Riley,2005)。需要与领域专家持续合作以确保其相关性和准确性(Giarratano & Riley,2004)。 CLIPS(C 语言集成生产系统)是一种基于规则的编程语言和开发环境,广泛用于开发专家系统和其他基于知识的应用程序。 它最初由 NASA 于 20 世纪 80 年代初开发,现已成为最受欢迎和广泛采用的专家系统工具之一。 CLIPS 是一个开源软件包,提供了一组丰富的功能来创建和操作基于规则的系统(Giarratano & Riley,2005)。需要与领域专家持续合作以确保其相关性和准确性(Giarratano & Riley,2004)。 CLIPS(C 语言集成生产系统)是一种基于规则的编程语言和开发环境,广泛用于开发专家系统和其他基于知识的应用程序。 它最初由 NASA 于 20 世纪 80 年代初开发,现已成为最受欢迎和广泛采用的专家系统工具之一。 CLIPS 是一个开源软件包,提供了一组丰富的功能来创建和操作基于规则的系统(Giarratano & Riley,2005)。