机构名称:
¥ 1.0
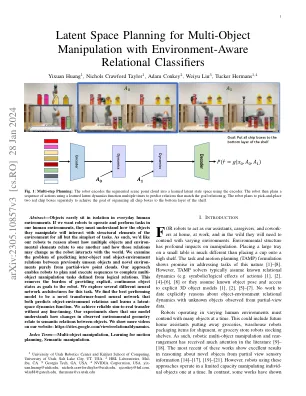
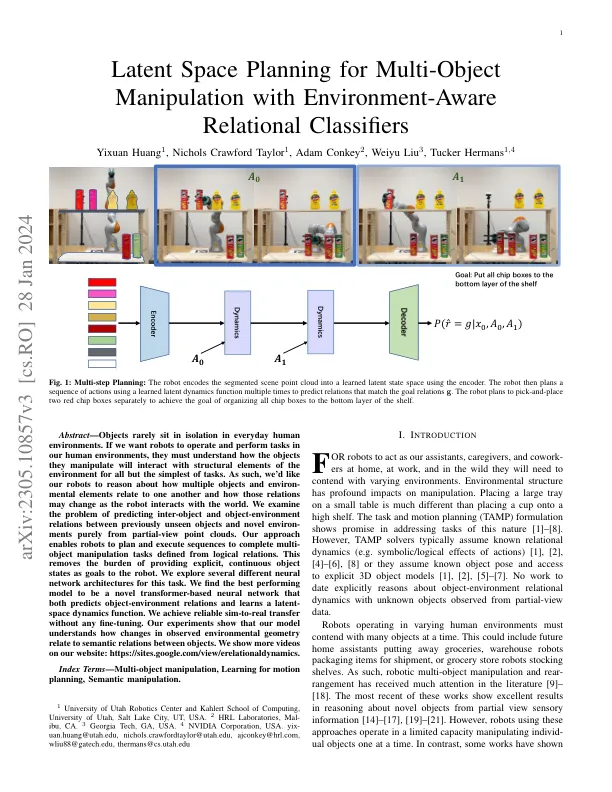
摘要 - 对象很少在日常的人类环境中孤立地坐着。如果我们希望机器人在人类环境中操作和执行任务,他们必须了解他们操纵的对象将如何与最简单的任务相互作用。因此,我们希望我们的机器人推理多个对象和环境元素如何相互关系,以及这些关系在机器人与世界互动时可能会发生变化。我们研究了以前看不见的对象和新颖的环境之间纯粹来自部分视图点云之间预测目标间和对象环境关系的问题。我们的方法使机器人能够计划和执行序列,以完成由逻辑关系定义的多对象操纵任务。这消除了提供明确的,连续的对象作为机器人目标的负担。我们为此任务探索了几种不同的神经网络体系结构。我们发现最佳性能模型是一个基于新颖的变压器神经网络,既可以预测对象环境关系,又可以学习潜在空间动力学功能。我们实现了可靠的SIM转移传输,而无需进行任何微调。我们的实验表明,我们的模型了解观察到的环境几何形状的变化如何与对象之间的语义关系有关。我们在网站上显示更多视频:https://sites.google.com/view/erelationaldynamics。
通过环境意识的关系分类器进行多对象操作的潜在空间计划
主要关键词




相关文件推荐