XiaoMi-AI文件搜索系统
World File Search System锁箱

端到端网络中断 - 检查中间箱...
网络中间箱是现代网络系统中的重要组成部分,根据最近的研究影响了大约40%的网络路径。这篇调查文章深入研究了他们的地方性存在,以超过二十年的发现丰富了2002 RFC,并强调了它们在安全和绩效方面的影响。此外,它根据其功能,目标和更改对网络中间箱进行分类。在当今的世界中,网络中间箱作为双刃剑出现。虽然对网络操作很重要,但它们也带来了安全风险。我们提出了他们引入的各种挑战,包括它们对互联网骨化的贡献,审查制度,监视和交通差异的潜力。巨大的努力仍然是使他们的存在对最终用户更加可见。本文探讨了潜在的解决方案,从预防和检测到治疗措施。最终,我们旨在将这项调查作为解决围绕网络中间箱概念的挑战的基础资源,从而促进该领域的进一步研究和创新。

支撑架机翼和箱形翼配置。未来...
翼梁,肋骨和字符串也是由支柱支撑的版本。的差异在于一个事实,即通过张力吸收一部分载荷(如果存在高翼的配置,如图2所示)或压缩(如果是低翼构造)。这意味着机翼的结构可以更轻,甚至可能在相同数量的质量方面更大[1]。这意味着在结构上更轻,更长,更薄的翅膀具有较高的细长度,从而提高了空气动力学效率或L/D比。此外,提高的效率将意味着飞机还需要减少燃料,从而减轻重量。,尽管这种配置也有一些缺点,因为支撑杆本身也增加了飞机的质量,并增加了飞机湿润的表面,从而增加了其寄生虫的阻力。也必须注意干扰和添加的结构复杂性,并且这种配置可能导致的空气弹性问题[2]。对于短途飞机来说,这种设计特别有趣,其中更具空气动力的机翼可以提供更高的攀爬速度和更滑的CD(连续下降)。
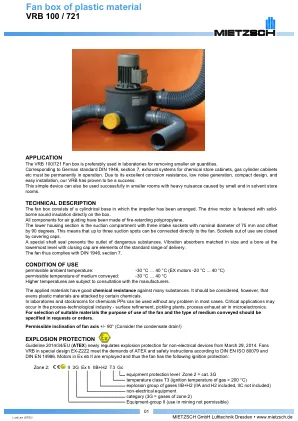
塑料材质的风扇箱 - VRB 100 / 721
技术说明 风扇箱由一个圆柱形底座组成,叶轮安装在底座内。驱动电机直接用固体隔音材料固定在箱体上。所有用于空气引导的部件均由阻燃聚丙烯制成。下部外壳部分是吸入室,带有三个进气插座,其公称直径为 75 毫米,偏移 90 度。这意味着最多可以将三个吸入点直接连接到风扇上。不使用的插座用盖帽封闭。特殊的轴密封件可防止危险物质的流出。尺寸匹配的减震器和最下层带有封闭盖的孔是标准交付范围的元素。因此,风扇符合 DIN 1946 第 7 节的规定。
使用...设计和构建智能锁系统
本文旨在利用物联网 (IoT)、WiFi 模块、继电器模块和其他外围设备设计和构建智能门锁系统,为人们提供无与伦比的家庭入口控制和可访问性。传统门锁系统速度慢、不安全且易受攻击,需要人工干预才能锁定和解锁。因此,基于 IoT 的智能门锁系统提供了性能更好的适当锁保护机制。该系统包括微控制器 (NodeMCU ESP8266)、电磁锁、直流电池 (12V)、5V 3A 降压转换器 (LM7805)、WiFi 模块和开关设备 (继电器)。使用 3 个独立设备对系统设置进行了 10 次试验测试。所有试验都准确地解释了收到的命令并将相应的信号传输到接口的继电器模块。随后,继电器模块对集成电磁锁机构执行锁定/解锁操作,从而实现了研究的预期目标。

使用 NAC1080 实现 NFC 被动锁
2 如何设计无源智能锁系统.......................................................................................................................................................................................3 2.1 单芯片解决方案....................................................................................................................................................................................................3 2.1.1 单芯片解决方案.......................................................................................................................................................................................................3 2.1.2 集成式智能锁系统.......................................................................................................................................................................3 2.1.3 集成式智能锁系统.......................................................................................................................................................................3 2.1.4 单芯片解决方案.......................................................................................................................................................................................................3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ................. ... ................. ... .................. 18 2.7 应急电源.................. ... 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 23
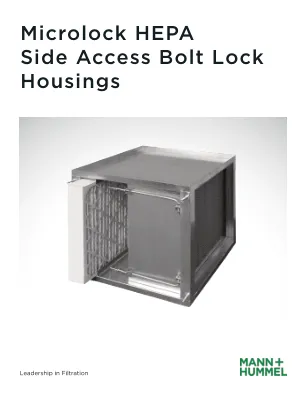
Microlock HEPA 侧门螺栓锁外壳
Microlock HEPA SA 螺栓锁外壳采用摆动螺栓锁定机制,确保过滤器和外壳垫圈之间完美密封,并降低关键环境中空气旁路的可能性。此密封通过外壳内部的连续平面安装表面实现,该表面与过滤器上的周边垫圈配合。创建此密封只需将摆臂定位在过滤器旁边,然后定位并拧紧弹簧夹以将过滤器固定在外壳的周边安装表面上。

机器人夹爪自锁欠驱动机构
摘要 — 我们描述了一种新型机电一体化机器人夹持器的设计概念和第一个原型,该夹持器旨在安装在人形机器人上,以实现牢固(即锁定)和稳健的抓握。这种抓握可以理想地支持复杂的多接触运动,例如爬梯子或操纵复杂工具,同时具有节能效果。为此,我们提出了一种解决方案,即设计一种智能自锁欠驱动机构,该机构与执行器并联安装,当实现所需的抓握时自动触发。该设计通过差速齿轮利用夹持器和制动器之间的可调功率分配。我们的夹持器具有自适应、牢固抓握和节能功能的优势,并通过原型夹持器进行了实验。

基于相锁的值函数连接矩阵和CNN-LSTM
摘要:为了有效地检测由虚拟现实环境引起的运动疾病,我们开发了一种专门设计用于视觉诱导的运动疾病的分类模型,采用了相位锁定值(PLV)功能连接矩阵和CNN-LSTM架构。该模型解决了传统机器学习算法的缺点,尤其是它们在处理非线性数据方面的功能有限。我们使用来自25名参与者的EEG数据构建了基于PLV的功能连接矩阵和网络拓扑图。我们的分析表明,视觉诱发的运动疾病显着改变了脑电图中的同步模式,尤其是影响额叶和颞叶。功能连接矩阵用作我们的CNN-LSTM模型的输入,该模型用于对视觉诱导的运动疾病的状态进行分类。该模型表现出优于其他方法的优越性能,从而达到了伽马频带中最高的分类精度。具体来说,二进制分类的最高平均准确度为99.56%,三元分类达到86.94%。这些结果强调了该模型的分类有效性和稳定性,使其成为帮助诊断运动疾病的宝贵工具。

研究单个事件闩锁现象...
客观概述,实验设置,结果和讨论…….................................................................................................................................................................................................................................................................................................................................................................16辐照设施和设置…………………………………………………………………………20 Single Event Latchup Results & Discussion…..………………………………... 21 ADS9818………………………………………………………………………………... 25 Device & Test Board Information…………..…………………………………… 25 Testing Facility & 设置…………..…………………………………………。…。27闩锁复制结果和讨论…..………………………………………………………………………………………………………………………………………………………………………………………………………………………………… 设置…………..……………...………………………。…。30单个事件闩锁结果……………………………………………………………………………………………………………………………………………………………………………………………32
带有密锁和联锁的车尾连接...
Brendan Crowley,Knorr Brake Corp. Ryan Crowley,Atkins Global NA Richard Curtis,Curtis Engineering Consulting Steven Dedmon,Standard Steel LLC Joe Di Liello,VIA Rail Canada Inc. David Diaz,LTK Engineering Services Adam Eby,Amtrak Phillippe Etchessahar,ALSTOM Transport Gary Fairbanks,联邦铁路管理局 Robert Festa,MTA Long Island Rail Road Steve Finegan,Atkins Global NA Gavin Fraser,Jacobs Francesco Fumarola,ALSTOM Transport Edward Gacsi,New Jersey Transit Joe Gagliardino,Arcosa Sebastien Geraud,ALSTOM Transport Jeffrey Gordon,联邦铁路管理局 Guillaume Ham-Livet,ALSTOM Transport Nick Harris,LTK Engineering Services Jasen Haskins,Atkins Global NA James Herzog,LTK Engineering Services Kenneth Hesser,LTK Engineering Services Lew Hoens,MTA Metro-North Railroad Christopher Holliday,STV Inc. George Hud,LTK 工程服务公司 John Janiszewski,LTK 工程服务公司 MaryClara Jones,运输技术中心 Robert Jones,Stadler 铁路集团 Larry Kelterborn,LDK Advisory,Inc. Joseph Kenas,庞巴迪运输公司 Peter Klauser,车辆动力学 Heinz-Peter Kotz,西门子交通公司 Scott Kramer,Arcosa Tammy Krause,Atkins Global NA Pallavi Lal,LTK 工程服务公司 Peter Lapre,联邦铁路管理局 Nicolas Lessard,庞巴迪运输公司 Cameron Lonsdale,标准钢铁有限责任公司 Daniel Luskin,美国铁路公司 Chris Madden,美国铁路公司 Francesco Maldari,MTA 长岛铁路 Brian Marquis,沃尔普国家铁路公司运输。系统。中心 Eloy Martinez,LTK 工程服务 Francis Mascarenhas,Metra Raynald Masse,Reseau de Transport Metropolitain Robert May,LTK 工程服务 Ronald Mayville,Simpson Gumpertz & Heger,Inc. Richard Mazur,Wabtec Corp. Patrick McCunney,Atkins Global NA Gerard McIntyre,Knorr Brake Corp. Bryan McLaughlin,Knorr Brake Corp.