XiaoMi-AI文件搜索系统
World File Search System非机动
基本战斗机机动 (bfm) 和全天候拦截 (awi ...
图表 图 1-1 水平机动 ................................................................................................................ 1-4 图 1-2 垂直机动 ................................................................................................................ 1-5 图 1-3 EM 图 (10,000 MSL) ............................................................................................ 1-6 图 1-4 升力限制和转弯空速 ...................................................................................................... 1-7 图 1-5 可用 G 值 ................................................................................................................ 1-8 图 1-6 转弯速率带 ................................................................................................................ 1-9 图 1-7 转弯半径带 ................................................................................................................ 1-10 图 1-8 T-45C 性能表 ............................................................................................................. 1-11 图 1-9 T-45C 尾部倾斜 (AOT) ............................................................................................. 1-12 图 1-10 气泡、控制区和攻击窗口 ................................................................................. 1-12平面外机动 ................................................................................................ 1-14 图 1-12 平面内与平面外追击曲线 .......................................................................................... 1-15 图 1-13 领先追击、纯追击和滞后追击 ...................................................................................... 1-16 图 1-14 单环流 ...................................................................................................................... 1-16 图 1-15 双环流 ...................................................................................................................... 1-17 图 1-16 高溜溜球 ...................................................................................................................... 1-19 图 1-17 低溜溜球 ...................................................................................................................... 1-20 图 1-18 位移滚转 ...................................................................................................................... 1-21 图 1-19 3/9 线超越 ............................................................................................................. 1-22 图 1-20 飞行路径超越 ............................................................................................................. 1-22 图 1-21 近距过冲,反转滚动...................................................................................... 1-23 图 1-22 反转时序...................................................................................................... 1-23 图 1-23 平剪刀......................................................................................................................... 1-24 图 1-24 滚动剪刀........................................................................................................................................... 1-26 图 1-25 CNATRA 武器包线 .............................................................................. 1-27 图 1-26 翼尖打开,机枪“D”低 .............................................................................. 1-31 图 1-27 9K' 设置在气泡外/纯追逐以进入气泡 ............................................................. 1-33 图 1-28 9K' 攻击窗口进入机械 ...................................................................................... 1-33 图 1-29 9K' 设置未对准的转弯圆环 ............................................................................. 1-34 图 1-30 使用照明弹进行防御性突破转弯 ............................................................................. 1-35 图 1-31 在气泡内匹配攻击者的拉力 ............................................................................. 1-36 图 1-32 成功速率管理返回中立传球 ............................................................................. 1-36 图 1-33 尽可能偏离,180 度向外................................................................... 1-37 图 1-34 6K' 设置,刚好在气泡外 .............................................................................. 1-38 图 1-35 首先向出发点滞后,然后跟进水上迫降 ........................................................ 1-39 图 1-36 水上迫降机制,拒绝控制区 ............................................................................. 1-40 图 1-37 3K' 设置,在气泡内 ............................................................................................. 1-42 图 1-38 完成战斗,机动到武器使用 ............................................................................. 1-43 图 1-39 甲板上反转 ............................................................................................................. 1-44 图 1-40 专用转弯空间 ............................................................................................. 1-47 图 1-41 垂直合并 ............................................................................................................. 1-48 图 1-42 高机头反击 ............................................................................................................. 1-49 图 1-43 首次移动选项,水平 ................................................................................ 1-50 图 1-44 第一次移动选项,机头高 .............................................................................. 1-51........................................................... 1-34 图 1-30 使用照明弹进行防御性突破转弯 .............................................................................. 1-35 图 1-31 在气泡内匹配攻击者的拉力 .............................................................................. 1-36 图 1-32 成功速率管理返回中立传球 ............................................................................. 1-36 图 1-33 尽可能偏离,180 度外 ............................................................................................. 1-37 图 1-34 6K' 设置,就在气泡外 ............................................................................................. 1-38 图 1-35 首先滞后向出发点飞行,然后跟进迫降 ............................................................................. 1-39 图 1-36 迫降机制,拒绝控制区 ............................................................................................. 1-40 图 1-37 3K' 设置,在气泡内 ............................................................................................. 1-42 图 1-38 完成战斗,机动到武器使用 ............................................................................. 1-43 图 1-39 甲板上反转 ...................................................................................................... 1-44 图 1-40 专用转弯空间 ................................................................................................ 1-47 图 1-41 垂直合并 ................................................................................................................ 1-48 图 1-42 机头上反击 ............................................................................................................. 1-49 图 1-43 第一个移动选项,水平 ............................................................................................. 1-50 图 1-44 第一个移动选项,机头上 ............................................................................................. 1-51........................................................... 1-34 图 1-30 使用照明弹进行防御性突破转弯 .............................................................................. 1-35 图 1-31 在气泡内匹配攻击者的拉力 .............................................................................. 1-36 图 1-32 成功速率管理返回中立传球 ............................................................................. 1-36 图 1-33 尽可能偏离,180 度外 ............................................................................................. 1-37 图 1-34 6K' 设置,就在气泡外 ............................................................................................. 1-38 图 1-35 首先滞后向出发点飞行,然后跟进迫降 ............................................................................. 1-39 图 1-36 迫降机制,拒绝控制区 ............................................................................................. 1-40 图 1-37 3K' 设置,在气泡内 ............................................................................................. 1-42 图 1-38 完成战斗,机动到武器使用 ............................................................................. 1-43 图 1-39 甲板上反转 ...................................................................................................... 1-44 图 1-40 专用转弯空间 ................................................................................................ 1-47 图 1-41 垂直合并 ................................................................................................................ 1-48 图 1-42 机头上反击 ............................................................................................................. 1-49 图 1-43 第一个移动选项,水平 ............................................................................................. 1-50 图 1-44 第一个移动选项,机头上 ............................................................................................. 1-511-43 图 1-39 甲板上反转 ...................................................................................................... 1-44 图 1-40 专用转弯空间 ................................................................................................ 1-47 图 1-41 垂直合并 ................................................................................................................ 1-48 图 1-42 机头上反击 ............................................................................................................. 1-49 图 1-43 第一个移动选项,水平 ............................................................................................. 1-50 图 1-44 第一个移动选项,机头上 ............................................................................................. 1-511-43 图 1-39 甲板上反转 ...................................................................................................... 1-44 图 1-40 专用转弯空间 ................................................................................................ 1-47 图 1-41 垂直合并 ................................................................................................................ 1-48 图 1-42 机头上反击 ............................................................................................................. 1-49 图 1-43 第一个移动选项,水平 ............................................................................................. 1-50 图 1-44 第一个移动选项,机头上 ............................................................................................. 1-51
左旋太阳阴影机动编程和安装说明
入门安装概述.............................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................

使用机动装置在风洞中进行虚拟飞行测试
一般权利 对论文的访问受 Creative Commons 署名 - 非商业性使用 - 禁止演绎 4.0 国际公共许可证的约束。可在 https://creativecommons.org/licenses/by-nc-nd/4.0/legalcode 找到此许可证的副本。 此许可证规定了您的权利以及对您访问论文的限制,因此在继续之前阅读此许可证非常重要。删除政策 由于版权限制,本论文的某些页面在存入 Explore Bristol Research 之前可能已被删除。但是,如果您在论文中发现了您认为是非法的材料,例如侵犯版权(无论是您的还是第三方的)或任何其他法律,包括但不限于与专利、商标、保密、数据保护、淫秽、诽谤、诽谤有关的法律,请联系 collections-metadata@bristol.ac.uk 并在您的消息中包含以下信息:

利用轨迹优化进行空间检测机动分析
对太空物体进行太空检查和特性描述的能力是下一代太空态势感知的核心。诊断和应对航天器异常的能力往往因缺乏对飞行中的目标飞行器进行检查或测试的能力而受到阻碍。虽然可伸缩臂(如部署在航天飞机和空间站上的机械臂)可以提供一些有限的检查能力,但自由飞行的伴生飞行器可以提供围绕目标的最大移动灵活性。安全高效地使用伴生飞行器需要能够最大限度地减少航天器资源(例如时间或燃料)的轨迹,同时遵守复杂的路径和状态约束。本文研究并比较了用于在复杂约束下寻找各种潜在检查操作的最佳轨迹的解决方法。研究的两种解决方法是基于随机性的自适应 A* 搜索方法和基于直接配置的非线性优化方法。我们研究了利用脉冲燃烧和连续推进的轨迹,以及包括额外约束的问题,例如在复杂环境中检查特定目标区域可能需要的复杂禁区和推进器羽流限制。这项工作具有广泛的适用性,可以扩展到适用于各种相对轨迹问题。一个这样的例子涉及多个检查卫星共同进行太空检查机动,需要高效计算复杂的相对运动轨迹。
使用机动装置在风洞中进行虚拟飞行测试
一般权利 对论文的访问受知识共享署名-非商业-禁止演绎 4.0 国际公共许可证的约束。此许可证的副本可在 https://creativecommons.org/licenses/by-nc-nd/4.0/legalcode 找到。此许可证规定了您的权利以及您访问论文的限制,因此在继续之前阅读它很重要。删除政策 由于版权限制,本论文的一些页面在存入探索布里斯托尔研究中心之前可能已被删除。但是,如果您发现论文中存在您认为违法的材料,例如侵犯版权(无论是您的还是第三方的)或任何其他法律,包括但不限于与专利、商标、保密、数据保护、淫秽、诽谤、诽谤有关的法律,请联系 collections-metadata@bristol.ac.uk 并在您的消息中包含以下信息:

逻辑机动:检测和缓解太空中的对抗性硬件故障
摘要 — 卫星极易受到太空中敌对故障或高能辐射的影响,这可能导致机载计算机出现故障。过去几十年来,人们探索了各种辐射和容错方法,例如纠错码 (ECC) 和基于冗余的方法,以缓解软件和硬件上的临时软错误。然而,传统的 ECC 方法无法处理硬件组件中的硬错误或永久性故障。这项工作引入了一种基于检测和响应的对策来处理部分损坏的处理器芯片。它可以从永久性故障中恢复处理器芯片,并利用芯片上可用的未损坏资源实现连续运行。我们在目标处理器的芯片上加入了基于数字兼容延迟的传感器,以便在发生故障之前可靠地检测到芯片物理结构上的传入辐射或故障尝试。在检测到处理器算术逻辑单元 (ALU) 的一个或多个组件出现故障后,我们的对策采用自适应软件重新编译来重新合成受影响的指令,并用仍在运行的组件的指令替换这些指令,以完成任务。此外,如果故障范围更广,并妨碍了整个处理器的正常运行,我们的方法将部署自适应硬件部分重新配置来替换故障组件并将其重新路由到芯片的未损坏位置。为了验证我们的说法,我们在 28 nm FPGA 上实现的 RISC-V 处理器上部署了高能近红外 (NIR) 激光束,通过部分损坏 FPGA 结构来模拟辐射甚至硬错误。我们证明我们的传感器可以自信地检测到辐射并触发处理器测试和故障恢复机制。最后,我们讨论了我们的对策带来的开销。
非机密 非机密
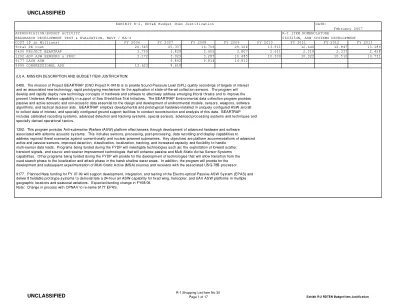
0490. BEARTRAP 项目(CNO 项目 K-0416)的任务是提供目标声压级 (SPL) 质量记录以及相关新技术、快速原型机制,以应用最先进的收集传感器。该计划将开发并快速部署硬件和软件方面的新技术概念,以有效应对新出现的沿海威胁,并提高目前的海底作战能力,以支持海上盾牌/海上试验计划。BEARTRAP 环境数据收集计划提供被动和主动声学和非声学数据,这些数据对于设计和开发环境模型、传感器、武器、软件算法和战术决策辅助工具至关重要。BEARTRAP 使用安装在独特配置的 ASW 飞机上的开发和原型硬件来收集感兴趣的数据,并使用专门配置的地面支持设施来重建和分析这些数据。BEARTRAP 包括校准的记录系统、先进的检测和跟踪系统、特殊传感器、先进的处理系统和技术以及专门衍生的作战策略。
从非...
1。Submission of notification ............................................................................................ 9 2.Approval of Import Inspection of Animals ................................................................... 10 3.Modification of Notification ......................................................................................... 10
非...
主持人:Tim Fout(DOE-FECM)3:15 - 3:35 PM谈话:预测的硝基胺和硝胺浓度的敏感性对模型在ADMS6 Brian Dinkelacker(ExxonMobil)(ExxonMobil)中的输入参数的敏感性3:35 - 4:00 PM谈话:环境和健康风险评估:环境和健康风险评估非COPS/COP)。 Higuchi (EPA/ORD) and Brian Shrager (EPA/OAQPS) 4:00 – 4:25 PM Talk: Evaluation of Atmospheric Chemistry and Dispersion Models Clint Tillerson (EPA/OAQPS) and Rob Pinder (EPA/ORD) 4:25 – 4:50 PM Case-Study: Measurements and Modelling of Non-CO 2 Emissions from Different Amine-based CO 2 Capture Plants in Australia, Norway, Canada and China商品Azzi(气候变化,能源,环境与水,澳大利亚政府)4:50 - 5:00 PM结束言论和休会