XiaoMi-AI文件搜索系统
World File Search System高程

WORLDDEM – 一种新型全球基础层
WORLDDEM – 新型全球基础层 G. Riegler、S. D. Hennig、M. Weber 空中客车防务与航天 – 地理情报,88039 Friedrichshafen,德国 - (gertrud.riegler、simon.hennig、marco.weber)@astrium.eads.net 关键词:WorldDEM、TanDEM-X 任务、高质量全球数字高程模型 摘要:空中客车防务与航天的 WorldDEM™ 提供具有空前质量、准确性和覆盖范围的全球数字高程模型。该产品在 12m x 12m 栅格中的垂直精度为 2m(相对),优于 6m(绝对)。其精度将超过任何现有的全球卫星高程模型。WorldDEM 是一项改变游戏规则的颠覆性技术,将定义全球高程模型的新标准。德国雷达卫星 TerraSAR-X 和 TanDEM-X 在太空中形成高精度雷达干涉仪,并为 WorldDEM 获取数据基础。这项任务与德国航空航天中心 (DLR) 联合执行。空中客车 DS 完善了数字表面模型(例如编辑采集、处理工件和水面)或生成数字地形模型。提供三个产品级别:WorldDEMcore(处理输出,不应用任何编辑)、WorldDEM™(保证无空隙地形描述和水文一致性)和 WorldDEM DTM(代表裸地高程)。精确的高程数据是任何精确地理空间产品的初始基础,特别是在基于它进行多源图像和数据集成时。融合数据可提高可靠性、增强置信度并减少歧义性。本文将介绍产品开发活动的现状,包括生成这些活动的方法和工具,如地形和水体编辑以及 DTM 生成。此外,还将介绍对 WorldDEM 产品的验证和确认研究。1.简介 数字高程模型 (DEM) 是许多商业和科学活动的关键,例如用于分析和预测环境和地球物理过程或事件,以进行危机干预规划,如洪水和风险测绘,用于水文、林业、多源地理数据正射校正和测绘、基础设施规划和导航等应用。例如,在石油和天然气业务中,高程信息对于进行石油和天然气田的可行性研究、勘探、开发和管理至关重要。高程模型的质量和可靠性至关重要。对高程信息的可用性、覆盖范围、准确性和同质性的要求日益提高。如今,市场上有许多来自各种机载和星载系统的 DEM 产品。大面积高度信息,尤其是全球 DEM,通常是来自各种来源的数据的拼凑,其中包含许多不同精度、分辨率、时间差、格式和投影的不同数据。结果很难统一,地球上每个点的质量也都不一样(Gantert 等人2011 年)。从 TanDEM-X 任务期间获取的 TanDEM-X DEM 衍生的 WorldDEM 是第一个来自同一来源的全球极点到极点数字高程模型。TanDEM-X 任务(TerraSAR-X 数字高程测量附加组件)是在德国航空航天中心 (DLR) 和空中客车防务与航天公司之间的公私合作伙伴关系 (PPP) 下实现的。空中客车 DS 拥有该数据的独家商业营销权,并负责根据全球商业用户的需求调整和完善高程模型 (Riegler 2013)。
使用GIS
Aster GDEM的数字高程模型(DEM):DEM是由无植被或建筑物的高程数据产生的地形表面的3D表示。它有助于计算影响太阳辐射效率和屋顶太阳能电池板效率的斜率,方面和阴影。先进的Spacemane热排放和反射辐射仪全球数字高程模型(Aster GDEM)是美国宇航局与日本经济,贸易和行业之间的合作。Aster GDEM以30米的高分辨率提供了全球高程数据,这是对地形的详细分析所必需的。它提供了高分辨率高程数据,用于地形分析,水文建模,坡度和方面分析,太阳辐射估计,基础设施计划,自然资源管理和灾难管理。钦奈的DEM对于绘制屋顶潜力,相对于地形识别建筑物的身高,建立屋顶倾斜度,方向以及评估周围地形和结构对太阳暴露的影响至关重要。USGS Earth Explorer Web应用程序允许用户搜索,预览和下载地球上任何位置的地理空间数据,并且在此需要在钦奈中分析太阳能屋顶潜力。
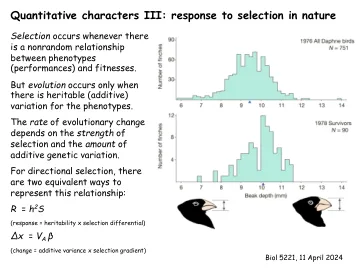
定量字符iii:对自然界选择的响应
Candace Galen注意到,在宾夕法尼亚山脉的高高(Tundra)高程在科罗拉多落基山脉的高高(Tundra)高程生长,其花朵比在较低(Timberline)海拔高度生长的花朵大12%。
钻孔轴检查员CBT第3课 - 设备和工具
钻孔轴结构不得开始,直到飞行员孔和/或负载测试报告得到工程师的批准。基于试验孔结果和/或负载测试的轴尖端高程可能因计划中提出的尖端高程而异。当工程师在钻孔时确定所遇到的材料时,通过额外的深度发掘更深入地扩展了钻孔的挖掘,并且与钻孔轴设计中预期的不相同。在没有合适的强度测试或负载测试的情况下评估被挖掘的材料,构造轴不高于计划中显示的尖端高程。
场地改造许可证申请分级和服务
• 住宅位置,包括甲板、人行道 • 前院、侧院和后院退让 • 成品楼面标高 • 地基顶部标高 • 入口位置和立管 • 地基墙标高 • 建筑角落/高点的洼地标高 • 侧院和后院洼地坡度 • 后院或前院 CB 的地役权(如适用) • 后院或前院 CB 位置/标高(如适用) • 车道宽度坡度和标高 • 挡土墙位置(如适用) • 高度为 1.0 米或更高的挡土墙需要由专业工程师盖章的结构设计和细节 • 挡土墙顶部和底部标高 • 挡土墙类型、细节和最大。高度 • 窗井和排水沟的位置 • 3:1 过渡坡的位置 • 落水管的位置/方向 • 现有和拟议服务连接的尺寸/位置 • 主干道服务连接的倒置高程 • 物业服务连接的倒置高程 • 地段角落高程和坡度变化处高程 • 提供侧院横截面,包括拟议和现有高程 • 沉积物控制 - 淤泥围栏、集水池沉淀池 • 符合城市标准 M-2A 的服务连接
住宅地块分级和排水规划要求
显示在平面图上。➢ 地块中心的道路中心线高程必须在平面图上显示。➢ 地块中心的所有后院排水沟以及竣工边缘和底部高程都必须显示在平面图上。➢ 地块侧院和后院洼地的百分比坡度和流向都必须显示在平面图上。➢ 拟建结构附近地产线上的拟建坡度高程。➢ 显示所有地役权(排水、卫生下水道等)。➢ 车道位置和配置及尺寸。➢ 显示所有落水管和污水泵导线。➢ 工程部要求的任何其他信息。所有非分区地块平整/排水平面图都必须由持牌工程师盖章,并包含以下内容:

1990年城镇和国家规划法 - 低霍顿
a。站点位置计划,图形编号P025-200-REV 01。2024年4月3日b。站点位置和上下文计划。图编号P21-0062-EN-15修订版A. c。拟议的现场计划。绘图编号P025-202-REV 06。2024年7月1日。详细的景观建议。图编号P21-0062-EN-17C。2024年7月30日e。贝斯大师网站布局计划。图编号P21-0062-EN-23。2024年7月0日f。拟议的海拔栅栏围栏。图编号P025-308 Rev 01。2024年4月18日G。 CCTV高程。图编号P025-303 Rev 02。2024年8月28日h。修订的门高程。图编号P025-309 Rev 01。2024年9月3日i。电池存储单元高程。绘图编号P025-300 Rev 02。2024年8月8日j。电源转换系统高程。图编号P025-301 Rev 02。2024年8月8日。 O&M建筑高程。图编号P025-304 Rev 02。2024年8月8日。福利办公室高程。绘图编号P025-305 Rev 02。2024年8月8日。水箱泵房的海拔。图编号P025-307 Rev 02。2024年8月8日。地表排水策略。绘图编号B764/20 Rev B.2024年9月30日o。洪水风险约束计划。绘图编号B764/16 Rev A.2024年5月p.customer变电站高度。绘图编号P025-302 Rev 02。2024年8月8日

基于 LiDAR 数据生成数字高程模型以进行历史景观分析,以佛兰德斯(比利时)为例
本文讨论了基于高密度机载 LiDAR(光检测和测距)数据生成高精度 DEM(数字高程模型)的方法,该方法用于跨学科景观考古学研究,研究对象为位于比利时根特北部的 Sandy Flanders 地区的定居历史和环境。目标是以 DEM 的形式创建一个详细的地形表面,其中不含人工特征和地形伪影,仅通过实现真实地面点来可视化自然和当前地形。这些特征和伪影的半自动去除是基于地形矢量数据、视觉解释和坡度分析。最终构建了两个 DEM:(1)TIN(不规则三角网络)模型,其固有的大文件格式限制了其在大比例尺下的可用性;(2)网格模型,可用于小、中、大比例尺应用。这两个数据集都用作使用来自历史来源的辅助数据进行解释的图像。其实用性在田野模式和微田地形的案例中得到了说明。从这个 DEM 开始,这项景观历史研究的方法主要是回溯性的,即从当代景观中仍然存在的景观结构和元素开始,然后进入过去。� 2010 年由 Elsevier Ltd. 出版。
军事工程师第17卷(2022年)第1期155–170。
在过去的 10 年中,技术发展改变了遥感科学的范式。如今,可以采用非常多样化的技术来捕获和/或提取非常精确的地形高程数据并准备数字高程模型。本文旨在回顾现有的遥感技术,这些技术可以通过非常精确的高程数据采集支持灾害补救(通过挖掘土壤)。回顾了地面技术(如地面激光扫描、InSAR 和 SfM)和机载技术(机载激光扫描 [ALS]、无人机摄影测量方法、带 LiDAR 的无人机)。根据以下技术标准检查它们的能力:空间效率、点密度、准确性和在灾难情况下的适用性。

威斯康星州绿色建造的家用标准多餐清单
1*完整的绿色建筑物清单2*站点计划:3*提供侵蚀控制方法和位置。4*表示站点干扰的极限。5*显示建筑占地面积和车道位置。6*建筑平面图:7*绘制的平面图以缩放和完全尺寸。8*提供屋顶屋檐和悬垂的尺寸。9*建筑高程:10*所有尺寸绘制的高程。11*高程应显示各个级别的地板和屋顶的成品高程。12*建筑横截面:13*显示横截面以提供内部细节以评估所使用的施工技术和材料。14*产品/材料信息:15*提供了用于此项目或项目规格副本的材料列表。16*单位地址清单:17*建筑物信封能源效率:18*提供由机械工程师或负责任的一方签名的字母,宣布该项目完全符合Ashrae 62.1-2010(高层项目4层或更大的故事)或Ashrae 62.1-2010或Energy Star New Home Sarte STAR STAR STAR STAR START(LOW RISE STAR STAR STARD PROVECTS STARKS 3 ERTIST 3 ERTIST)。