机构名称:
¥ 1.0
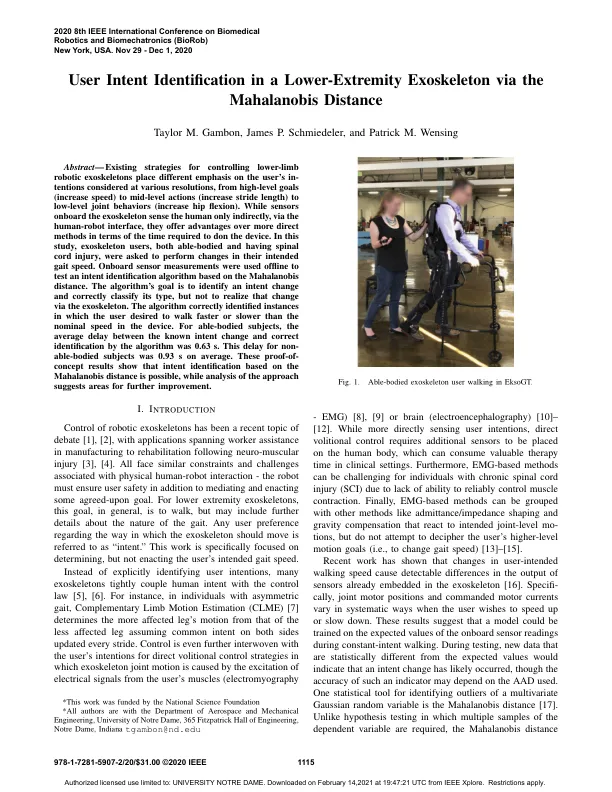
摘要 — 现有的下肢机器人外骨骼控制策略对用户意图的侧重点有所不同,这些意图的分辨率各不相同,从高级目标(提高速度)到中级动作(增加步幅)再到低级关节行为(增加髋关节屈曲)。虽然外骨骼上的传感器只能通过人机界面间接感知人类,但它们在穿戴设备所需的时间方面比更直接的方法更具优势。在本研究中,要求外骨骼用户(包括身体健全和脊髓损伤)改变他们的预期步行速度。机载传感器测量结果用于离线测试基于马哈拉诺比斯距离的意图识别算法。该算法的目标是识别意图变化并正确分类其类型,但不是通过外骨骼实现该变化。该算法正确识别了用户希望以比设备标称速度更快或更慢的速度行走的情况。对于体格健全的受试者,已知意图变化与算法正确识别之间的平均延迟为 0.63 秒。对于体格不健全的受试者,这一延迟平均为 0.93 秒。这些概念验证结果表明,基于马哈拉诺比斯距离的意图识别是可能的,而对该方法的分析表明,还有进一步改进的空间。
通过马哈拉诺比斯距离识别下肢外骨骼中的用户意图
主要关键词


相关文件推荐