机构名称:
¥ 3.0
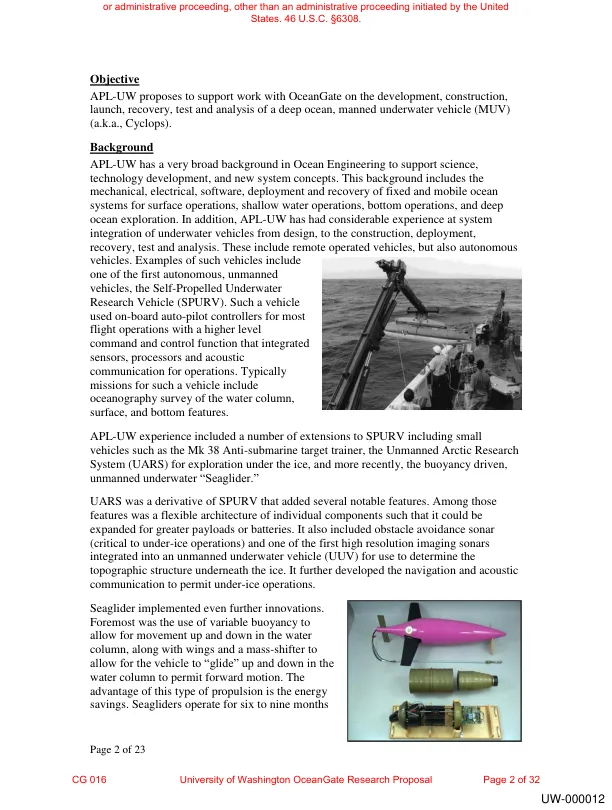
背景 APL-UW 在海洋工程方面拥有非常广泛的背景,以支持科学、技术开发和新系统概念。该背景包括用于水面作业、浅水作业、海底作业和深海勘探的固定和移动海洋系统的机械、电气、软件、部署和恢复。此外,APL-UW 在水下航行器的系统集成方面拥有丰富的经验,从设计到建造、部署、恢复、测试和分析。这些包括遥控航行器,也包括自动驾驶航行器。此类航行器的例子包括第一批自主无人航行器之一——自推进水下研究航行器 (SPURV)。这种航行器在大多数飞行操作中使用机载自动驾驶控制器,并具有更高级别的指挥和控制功能,该功能集成了传感器、处理器和声学通信。这种航行器通常执行的任务包括对水柱、表面和底部特征进行海洋学调查。
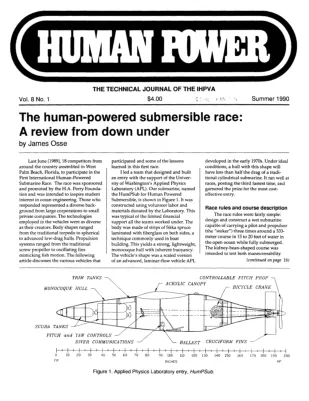
深海探测潜水器
主要关键词

相关文件推荐