机构名称:
¥ 1.0
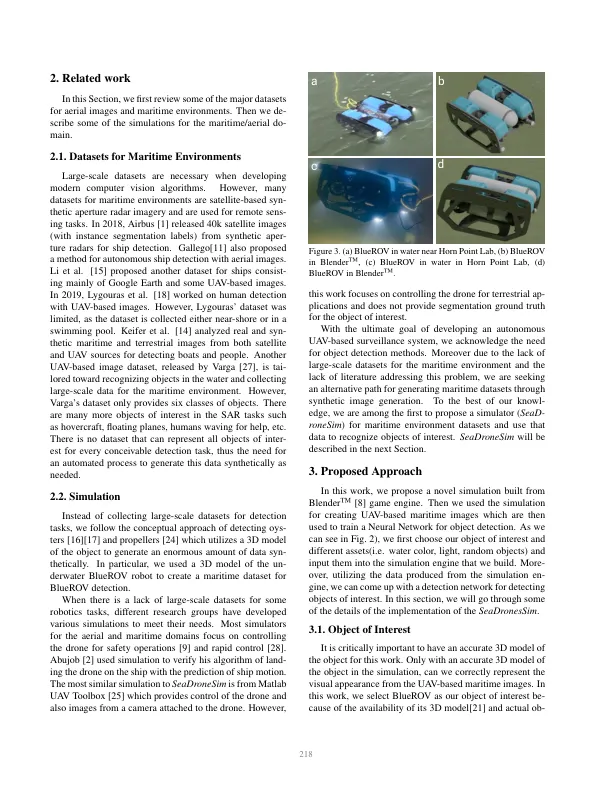
无人驾驶飞行器 (UAV) 以其速度快、功能多样而闻名,可用于收集航空图像和遥感数据,用于土地利用调查和精准农业。随着无人机的可用性和可访问性的增长,它们现在作为船舶监控和搜索救援 (SAR) 行动等海洋应用的技术支持至关重要。无人机上可以配备高分辨率摄像头和图形处理单元 (GPU),以有效和高效地帮助定位感兴趣的物体,适用于紧急救援行动,或者在我们的案例中,用于精准水产养殖应用。现代计算机视觉算法使我们能够在动态环境中检测感兴趣的物体;然而,这些算法依赖于从无人机收集的大型训练数据集,而目前在海洋环境中收集这些数据集非常耗时且费力。为此,我们提出了一个新的基准套件 SeaD- roneSim,它可用于创建具有真实感的照片级航空图像数据集,并为任何给定对象的分割掩模提供地面实况。仅利用 SeaDroneSim 生成的合成数据,我们在真实航拍图像上获得了 71 个平均精度 (mAP),用于检测我们感兴趣的对象,即本可行性研究中流行的开源遥控水下机器人 (BlueROV)。这款新模拟套装的结果可作为检测 BlueROV 的基准,可用于
SeaDroneSim:模拟空中图像以探测水面上的物体
主要关键词



相关文件推荐