机构名称:
¥ 1.0
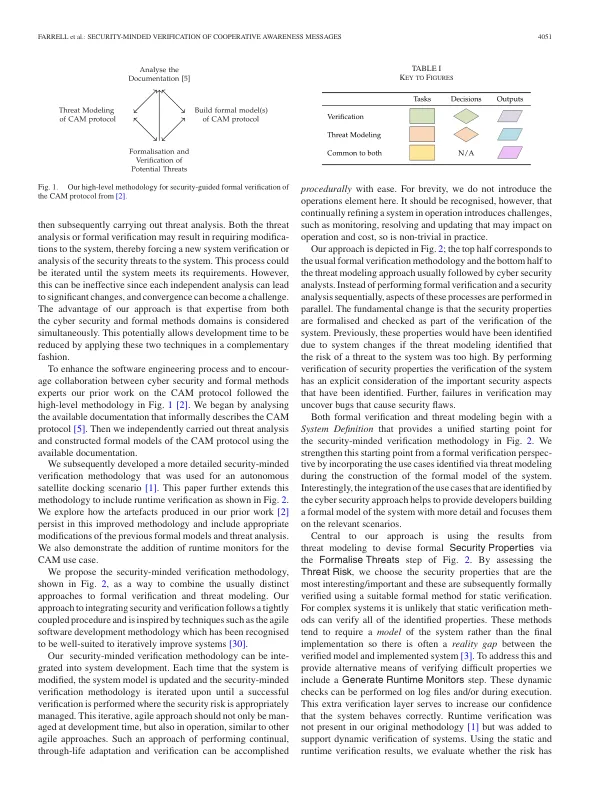
摘要 - 自治机器人系统系统既安全性和至关重要,因为违反了系统安全性可能会安全。在此类关键系统中,使用形式的验证来对系统进行建模并验证它遵守特定的功能和安全性能。独立地,威胁建模用于分析和管理这种系统可能遇到的网络安全威胁。验证和威胁分析的目的是确保系统将是可靠的,尽管从不同的角度来看。在先前的工作中,我们认为应该使用这些分析来互相告知,并在本文中扩展了以前定义的方法,用于通过合并运行时的验证来进行安全意识的验证。为了说明我们的方法,我们分析了一种算法,用于在自动驾驶汽车之间发送合作意识信息。我们的分析以确定步步安全威胁为中心。我们展示了如何将它们形式化,并随后使用用于静态方面的形式工具的组合,即Promela/Spin和Dafny,并为动态验证生成运行时监测器。我们的方法使我们能够将验证工作集中在那些特别重要的安全属性上,并在静态和运行时考虑串联的安全性和安全性。
安全意识验证合作意识消息
主要关键词




相关文件推荐