机构名称:
¥ 1.0
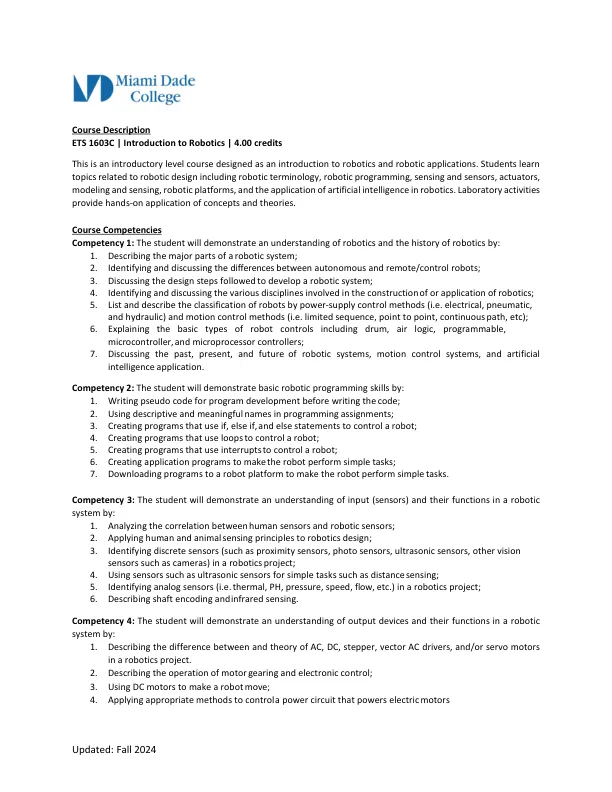
1。描述机器人系统的主要部分; 2。识别和讨论自主和远程/控制机器人之间的差异; 3。讨论遵循的设计步骤以开发机器人系统; 4。识别和讨论与机器人技术建设或应用有关的各种学科; 5。列表并描述通过功率供应控制方法对机器人的分类(即电气,气动和液压)和运动控制方法(即有限的序列,点到点,连续路径等); 6。解释机器人控件的基本类型,包括鼓,空气逻辑,可编程,微控制器和微处理器控制器; 7。讨论机器人系统,运动控制系统和人工智能应用的过去,现在和未来。
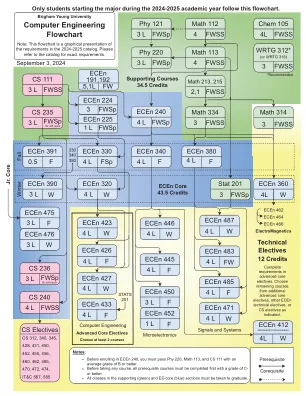
egn2200 |工程计算机应用ETS 1603C机器人学简介
主要关键词
相关文件推荐