机构名称:
¥ 1.0
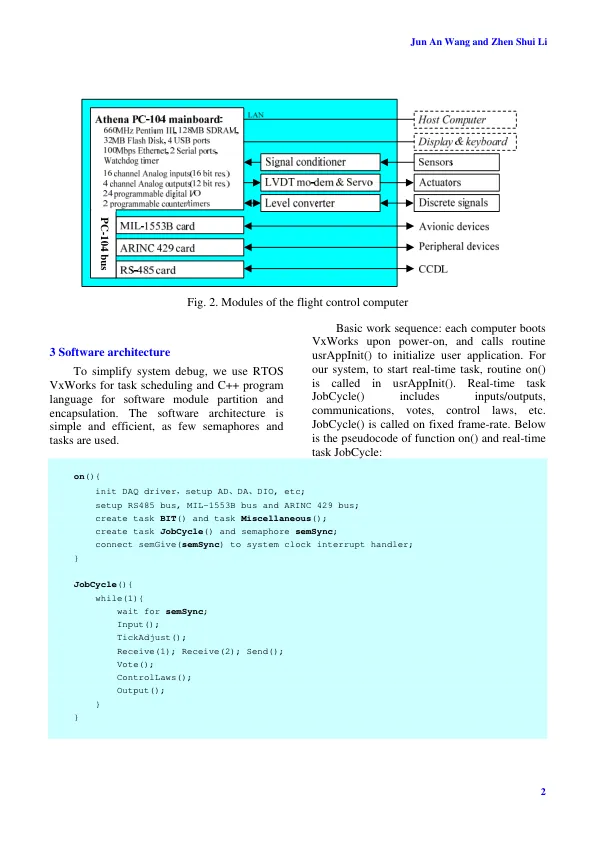
为了简化调试,还实现了例程 off()。在调试模式下,可以通过 shell 输入“off”停止实时任务。函数 Controllaws() 由几个具有不同速率的法则组成。我们以 100 Hz 的速率计算控制增强系统,以 33.3 Hz 的速率计算自动驾驶法则和其他参数。为了提高运行效率,使用内部计数器而不是任务来调度这些法则。控制法则通常由求和块、0 阶块、1 阶块、2 阶块、积分块、淡出块、死区块和饱和块组成。在我们的系统中,控制法则块由 C++ 类实现。Tustin 变换具有叠加特性,因此软件可以按框图顺序处理控制法则。为了简化系统调试,对于传感器输入和其他参数,使用浮点而不是整数作为数据类型;对于传感器输入,使用电压而不是实际物理值作为值。该软件是用 C++ 语言编写的。 C++ 比 C 具有更多优势,例如封装和覆盖。有时,这会导致可靠性问题。在飞行控制应用中,应认真考虑这一点。我们的解决方案是:1)在实时任务运行之前创建所有对象;2)在 IF-BIT 例程中检查系统健康状况。
基于PC-104嵌入式计算机的飞行控制系统开发
主要关键词
相关文件推荐