机构名称:
¥ 1.0
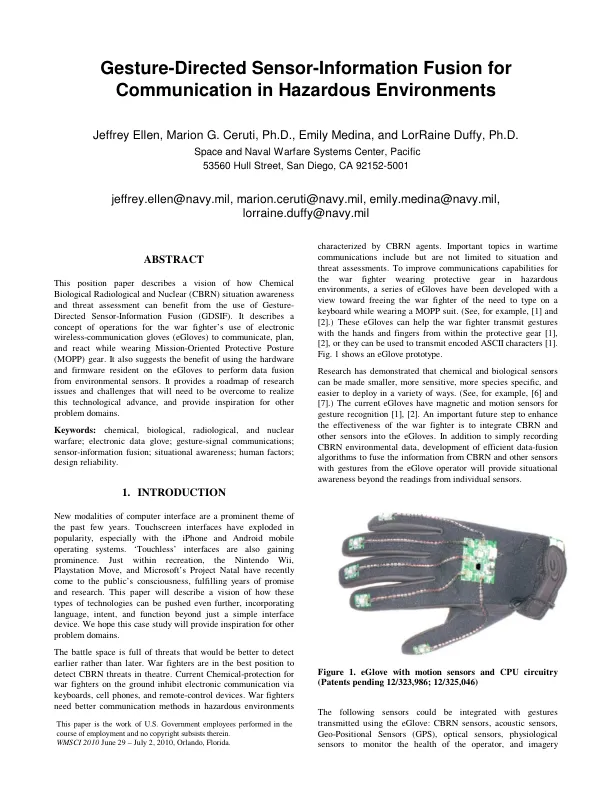
基于手势的传感器信息融合 (GBSIF) 是指将从环境中收集的传感器数据与电子手套上的运动传感器数据融合。电子手套具有中央处理单元 (CPU),用于将手和手指的动作和位置融合成手势,如图 1 所示。可以使用相同的 CPU 融合来自环境的其他数据。在 GBSIF 中,操作员传输传感器阵列,但不主动确定将参与融合的传感器或将收集数据的目标对象,安装在电子手套上的传感器除外。数据是从环境和手套传感器收集的,这些数据可以在不同于用户节点的网络站点上融合和集成。因此,手势传感器数据和环境数据在适当的情况下被收集、融合和集成。然而,手势本身并不是选择信息源和控制融合过程的主要驱动力。
用于危险环境中通信的手势导向传感器信息融合
主要关键词



相关文件推荐