XiaoMi-AI文件搜索系统
World File Search System一致性
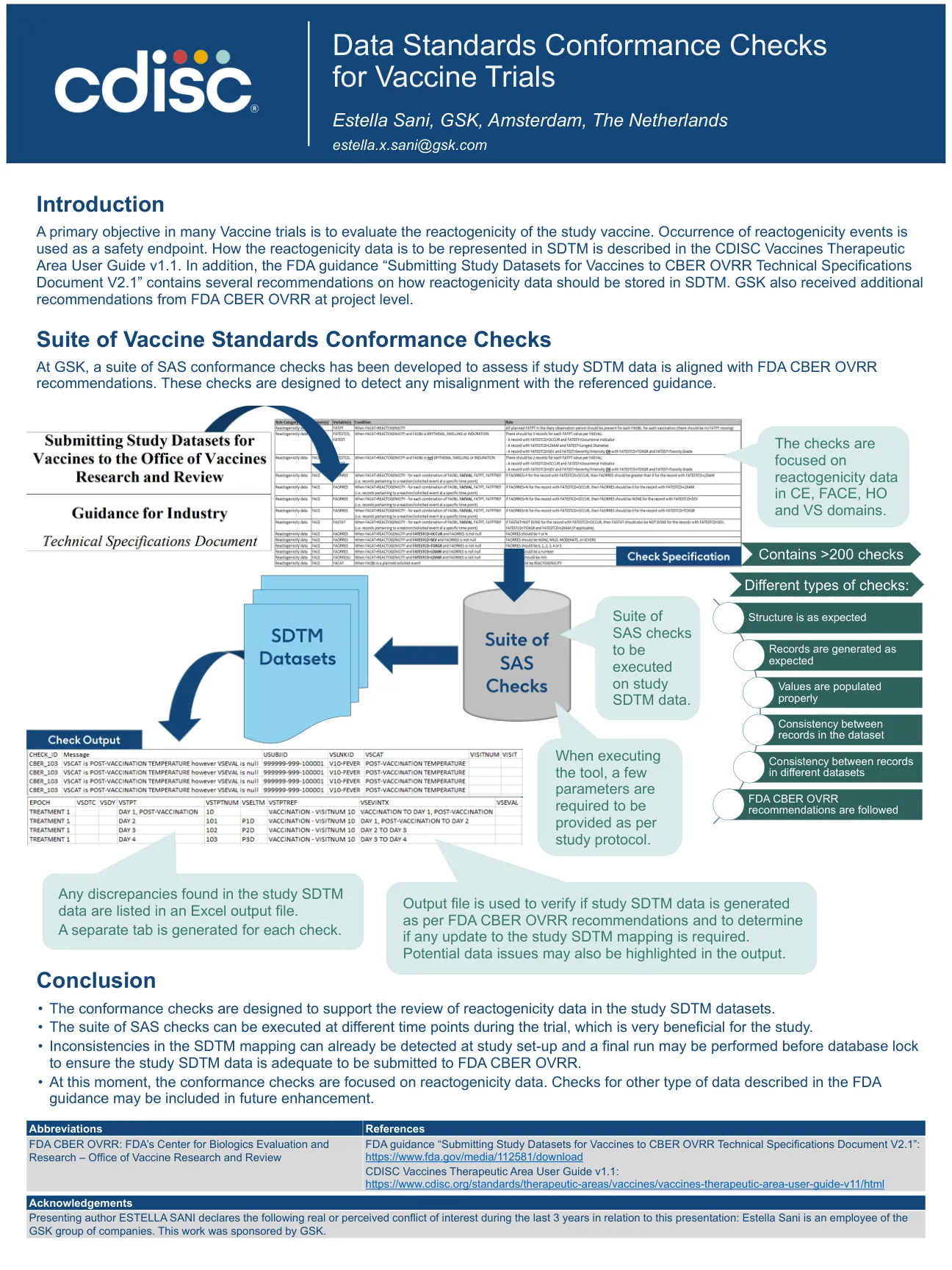
疫苗试验的数据标准一致性检查
• 一致性检查旨在支持对研究 SDTM 数据集中的反应原性数据的审查。 • SAS 检查套件可以在试验期间的不同时间点执行,这对研究非常有益。 • 在研究设置时已经可以检测到 SDTM 映射中的不一致,并且可以在数据库锁定之前执行最终运行,以确保研究 SDTM 数据足以提交给 FDA CBER OVRR。 • 目前,一致性检查侧重于反应原性数据。未来可能会包括对 FDA 指南中描述的其他类型数据的检查。
开放敏捷架构™ 实践者一致性...
ArchiMate、DirecNet、Making Standards Work、Open O 徽标、Open O 和 Check Certification 徽标、Platform 3.0、The Open Group、TOGAF、UNIX、UNIXWARE 和 Open Brand X 徽标是注册商标,无边界信息流、诚信构建放心购买、商业航空参考架构、通过保证实现可靠性、数字化从业者知识体系、DPBoK、EMMM、FACE、FACE 徽标、FHIM Profile Builder、FHIM 徽标、FPB、未来机载能力环境、IT4IT、IT4IT 徽标、O-AA、O-DEF、O-HERA、O-PAS、开放敏捷架构、Open FAIR、开放足迹、开放过程自动化、开放地下数据宇宙、开放可信技术提供商、OSDU、传感器集成简化、SOSA 和 SOSA 徽标是 The Open Group 的商标。所有其他品牌、公司和产品名称仅用于识别目的,可能是其各自所有者的唯一财产的商标。

通过解释 - 一致性的芬特培养
经常会产生不一致的解释,并在非常相关的问题上进行解释(Chen等人,2023b)。实际上,LLMS甚至常常难以回答同一问题的重塑(Sclar等人,2023;张等。,2023)。目前尚不清楚适应LLM的流行方法,例如从人类反馈中监督的填充或加强学习能够解决此问题。我们通过引入解释 - 一致性登录(EC-FINETUNING)来解决此问题。ec-芬特列列列列斯在合成数据上的LLM精确构建以包含一致的规定。我们从一个问题解释对开始(例如,麻雀可以飞吗?”,“所有的鸟都可以飞”),产生一组相关问题(例如,“可以飞翔?”),然后回答与初始解释一致的相关问题(例如,“所有鸟类都可以飞行,以便企鹅可以飞”)。我们通过提示LLM来生成综合数据,这可能与解释LLM相同或不同。我们将EC-FINETIND应用于提问数据集,并发现它在四个芬口数据集中将自然语言解释的一致性提高了10.0%,也将七个分发数据集的概括( +4.5%相对)概括为七个未见到的数据集( +4.5%)。这表明EC-Finetuning通常对于帮助用户从其解释中构建LLM的心理模型很有用(见图1)。
速度管理:需要更大的一致性
然而,圆桌讨论已经确定对安全系统要素的知识和理解不足是其在全国范围内交付的主要障碍。尤其是,目前负责设定地方速度限制的地方当局缺乏资金和人力资源来将注意力集中在创新实践上。在安全的系统上下文中,当前单个行车道的国家速度限制不被认为是安全速度,并且应考虑降低的限制在网络的比例上。政府应设定道路安全目标,并为地方当局建立一个备受电话的基金,以便在道路安全人员和道路安全人员网络上花费,以确保共享和实施最佳实践。

形态学中的熟悉,一致性和系统化
语言学习涉及暴露于不一致的系统 - 即存在多种模式或方法以标记某些含义的系统。不一致的系统通常会随着时间的流逝而变化更加规律 - 它们被系统化。然而,一些最近的研究报告说,学习者倾向于在输入中再现不一致,从而导致语言学习机制基本上是防腐剂的模型。我们使用一种新颖的范式进行了人工语言学习实验,以扩展我们对语言学习中系统化与保留机制的理解。参与者被教给两个数字标记系统,要么完全一致(系统的概率P为1.00)或不一致(一个系统的P = 0.875,另一个系统的p = 0.125,依此类推,依此类推,依此类推,依此类推,P = 0.75和P = 0.625)。一个标记系统是一个复数标记系统。另一个是一种类型的罕见的单态标记系统。在概括新项目时,参与者总体上产生的定期输出模式比较不一致的条件更一致,而对复数标记条件的输入状况要比单人标记的条件更多。对于单次标记条件,参与式的变化要比复数标记的变化要大得多。有些人系统地朝着更熟悉的模式系统化,有些是针对不太熟悉的模式系统化的,有些人与概率匹配没有显着差异。我们展示了一个具有两个免费参数的模型如何在任何给定情况下都可以在其系统化的倾向上有所不同。我们分析了与当前统计学习模型相关的变化,表明保存群岛学习模型以及所有具有单个自由参数的模型都无法捕获我们的结果。我们还讨论了对语言变化理论的影响。
苏格兰政府的欧盟一致性政策
“ EMI感到失望的是,苏格兰政府并没有更积极地锁定Holyrood的立法程序,这是对使用自己的权力的更强有力的承诺,并敦促英国部长确保新英国立法与欧洲保持一致,并且随着法规的发展,它不会在原则上或不遵守EU Law of aud>
向导 RNA 位点一致性的表征
本演示文稿包含《1995 年私人证券诉讼改革法案》所定义的“前瞻性陈述”,涉及重大风险和不确定性,包括有关公司计划(包括 VERVE-101)的潜在优势和治疗潜力的陈述。本演示文稿中包含的所有陈述(历史事实陈述除外),包括有关公司战略、未来运营、未来财务状况、前景、计划和管理目标的陈述,均为前瞻性陈述。“预期”、“相信”、“继续”、“可能”、“估计”、“预计”、“打算”、“可能”、“计划”、“潜在”、“预测”、“项目”、“应该”、“目标”、“将”、“会”和类似表达旨在识别前瞻性陈述,但并非所有前瞻性陈述都包含这些识别词。任何前瞻性陈述均基于管理层当前对未来事件的预期,并受多种风险和不确定因素的影响,这些风险和不确定因素可能导致实际结果与此类前瞻性陈述中所述或暗示的结果存在重大不利差异。这些风险和不确定性包括但不限于与公司有限的经营历史有关的风险;公司及时提交和获得其产品候选物的监管申请批准的能力;推进其产品候选物的临床试验;按照预期的时间表或完全启动、招募和完成其正在进行的和未来的临床试验;正确估计公司产品候选物的潜在患者群体和/或市场;在临床试验中复制在 VERVE-101、VERVE-102 和 VERVE- 201 的临床前研究和/或早期临床试验中发现的积极结果;在当前和未来临床试验中按照预期的时间表推进其产品候选物的开发;获得、维护或保护与其产品候选物相关的知识产权;管理费用;并筹集实现其业务目标所需的大量额外资本。有关其他风险和不确定性以及其他重要因素的讨论,其中任何因素都可能导致公司的实际结果与前瞻性陈述中的结果不同,请参阅“风险因素”部分,以及公司最近向美国证券交易委员会提交的文件和公司未来向美国证券交易委员会提交的其他文件中对潜在风险、不确定性和其他重要因素的讨论。此外,本演示文稿中包含的前瞻性陈述代表公司截至本新闻稿之日的观点,不应被视为代表公司截至本新闻稿之日之后任何日期的观点。公司预计后续事件和发展将导致公司的观点发生变化。然而,尽管公司可能会选择在未来某个时间点更新这些前瞻性陈述,但公司明确表示不承担任何此类义务。


计划NEPA从业人员的计划一致性-Net
要确保遵守1969年《国家环境政策法》(NEPA),必须在联邦高速公路管理局(FHWA)批准最终环境文件之前实现计划一致性。佛罗里达运输部通过最初于2016年12月14日签署的理解备忘录,承担了NEPA的责任,并于2022年5月26日续签。规划一致性需要授权联邦政府的支出,从而晋升为项目开发的未来阶段。此过程可确保将环境考虑整合到项目的所有阶段,从本地开始,并贯穿MPO,州和联邦计划,这些计划表明了联邦运输支出的最大限制和公共透明度。

基准制定业务和IT战略的战略一致性
摘要。业务和IT策略对齐是一个复杂的动态过程,在该过程中,组织可以实现广泛的IT能力来实现其业务目标。这种相互依存的危机扩大了这种相互依存的危机,这使得IT和业务策略的整合比以往任何时候都更为重要。本文主要旨在从实际角度理解对战略一致性的理解,并证明战略对准模型(SAM)的适用性和鲁棒性。此外,分析了与业务和IT战略相关的潜在机会和风险。对31名参与者的定性分析(半结构化调查和访谈)进行了定性分析后进行了讨论。结果表明,影响战略一致性实施的几个困难超越了沟通,企业文化,治理,资源优先级和有效的领导力等业务和IT战略。该研究认为,有必要使组织内的不同议程和利益保持一致,并提高对战略一致性价值的理解。