XiaoMi-AI文件搜索系统
World File Search System人行
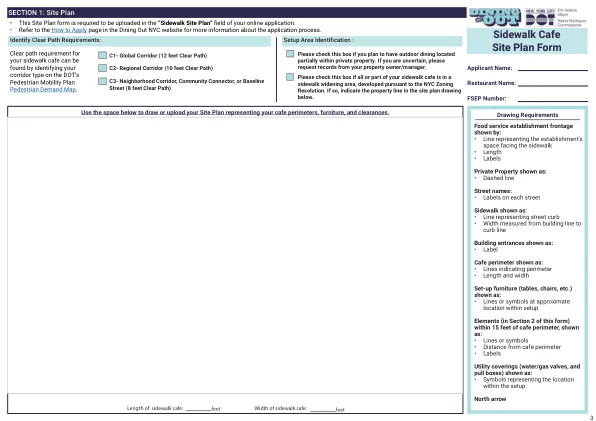
人行道咖啡馆场地规划表
• 请勾选类别旁边的方框,指明以下哪种材料将成为您人行道咖啡馆的一部分。如果适用,请勾选相关要求旁边的方框,确认材料符合纽约外出就餐的要求。• 有关材料的更多信息,请参阅纽约外出就餐网站的设置指南。与人行道咖啡馆至少有 15 英尺间隙的元素:

年龄对成人行政职能的影响不是性别特定的
目的:许多研究表明,与衰老相关的执行功能(EF)有所下降。但是,很少有调查检查整个成年期性别之间的下降是否相似。本研究研究了成年早期至后期男女与女性之间与年龄相关的EF的下降。方法:在18至78岁之间的总共302名参与者(181名妇女)在家完成了四个基于计算机的认知任务:一项基于箭头的侧翼任务,基于字母的视觉搜索任务,跟踪测试和CORSI任务。这些任务分别测量了抑制,注意力,认知灵活性和工作记忆。为了调查年龄,性别及其对特定EF和全球EF分数的潜在影响,我们将样本人口分为五个年龄段(即18 - 30,30,31 - 31 - 44,44,45 - 45 - 54,54,55 - 55 - 64,65 - 65 - 65 - 78),并将协方差(Mancova和Ancova)分析为教育和指向变量。结果:性别不会显着影响年龄组的EF表现。但是,在每项任务中,来自三个最年轻的群体(<55 y/o)的参与者都优于两个最古老的参与者。全球分数的结果还表明,与55岁以前的EF降低显着明显。结论:我们的结果表明,EF与年龄相关的下降,包括抑制作用,注意力,认知灵活性和工作记忆,在55岁的年龄左右变得显而易见,并且任何年龄之间的性别之间都没有差异。本研究提供了有关年龄和性别对整个成年期EF影响的其他数据,从而填补了现有文献的显着空白。
机器人行业中的中国有多创新?
可以肯定的是,很难评估任何国家行业的创新能力,但对于中国行业来说尤其困难。部分原因是,在XI总统下,中国向世界披露的信息要比以前要少得多,尤其是关于其工业和技术能力的信息。尽管如此,ITIF还是依靠三种方法来评估机器人技术中的中国创新。首先,我们对从欧盟R&D 2000列表中列出的机器人公司随机选择的三家中国机器人公司进行了深入的案例研究评估。第二,我们进行了访谈,并与全球机器人行业的全球专家举行了焦点小组。和第三,我们评估了有关机器人创新的全球数据,包括科学文章和专利。

机器人的机器人行为基于学习的个性化...
在机器人辅助疗法期间,机器人通常需要由治疗师部分或完全控制,例如使用“向导”方案;这使得治疗课程乏味,因为治疗师无法完全专注于与正在接受治疗的人的互动。在这项工作中,我们开发了一种基于学习的行为模型,该模型可用于增加机器人决策过程的自主权。我们将强化学习作为一种模型培训技术进行了研究,并比较考虑用户参与和活动性能的不同奖励功能。我们还分析了各种策略,旨在使学习过程更加易于处理,即i)具有学识渊博的用户模型的行为模型培训,ii)在用户组之间的策略转移; iii)从专家反馈中学习政策。我们证明,策略转移可以大大加快策略学习过程,尽管奖励功能对机器人可以选择的行动有重要影响。尽管本文的主要重点是个性化管道本身,但我们在一项小规模的现实世界可行性研究中进一步评估了学习的行为模型,在该研究中,六个用户与辅助机器人一起参加了序列学习游戏。这项研究的结果似乎表明,从指导中学习可能会在提高用户的参与度和游戏性能方面产生最适当的政策,但是需要进行大规模的用户研究以验证该观察的有效性。

普渡大学印第安纳波利斯校区人行横道
ARCH12000 建筑制图与建筑信息模型 (BIM) 简介 ART 15500 住宅建筑 ARCH15500 住宅建筑 ART 21000 建筑史 I ARCH21000 建筑史 I ART 22000 商业建筑 ARCH22200 商业建筑 ART 22300 3D 建筑建模 I ARCH22300 3D 建筑建模 I ART 32300 3D 建筑建模 II ARCH32300 3D 建筑建模 II AST-A 100 太阳系 AST A1000 太阳系 AST-A 105 恒星和星系 ASTR 2640N 恒星和星系 BIOL-K 101 生物学概念 I BIOL 11000 生物学概念 I BIOL 55600 生理学 I BIOL 5560N 生理学 I BIOL 55900 内分泌学 BIOL 5590N 内分泌学 BIOL 56100 免疫学 BIOL 5610N 免疫学 BME 20400 硬组织和软组织生物力学 BME21400 生物力学分析简介 BME 20600 生物力学与生物材料实验室 BME 21401 生物力学分析实验室 BME 20100 生物分子:结构、功能和工程应用

UPM 主管居里夫人行动
可持续热能 (TE4S) 研究小组专门从事应用热工程,从组件和系统级设计到数值分析和实验阶段。重点关注领域包括聚光太阳能技术、制氢、热能存储、涡轮机械、先进动力循环和能源系统建模。TE4S 坚定地致力于技术创新,这一点从其获得 50 多项专利(其中相当一部分获得国际认可)、在领先期刊上发表 300 多篇研究论文以及在不到 20 年的时间内发表近 50 篇博士论文可以看出。这些成就是参与由西班牙和地方政府、欧盟委员会和美国能源部资助的众多项目的结果。TE4S 与麻省理工学院、IASS-Potsdam 或桑迪亚国家实验室等知名学术机构和实验室建立了牢固的联盟。此外,与能源、电力和推进领域的行业和私营公司的频繁合作增强了 TE4S 的创新领导力。欲了解更多信息,请访问:TE4S 工作人员:https://short.upm.es/qwmqx TE4S 科学成果:https://short.upm.es/8a3zb
2021-2023固定索引年金合同持有人行为经验研究数据请求3月2024
▪同行组必须至少包含五(5)家公司。▪如果需要,任何具有占主导地位的数据的公司(即代表该组的25%以上),将缩放到25%。o如果您提交多个公司的数据,请联系studypro@soa.org,如果您希望将所有公司合并为一个“公司集团”或将其作为同行小组分析中的单独单独公司保存的数据。o作为数据贡献者,您承认并同意您公司的数据可能是另一家公司的同行小组分析的一部分。如果您想将公司的数据排除在另一家公司的同行小组分析中,请通知studypro@soa.org。在这种情况下,您的公司将无法选择接受同行组分析。•有机会与SOA研究所和Limra研究人员会面,他们进行了研究分析。在这次会议上,撰稿人将能够迅速获得对结果的更深入的见解,并在特定感兴趣的领域提出问题。

对行人行为预测的承诺和挑战
预测行人行为是确保自动驾驶汽车安全性和可靠性的关键。尽管通过从注释的视频框架序列中学习深入学习方法,但他们通常无法完全掌握行人与交通之间的动态相互作用,但可以进行准确的预测。这些模型也缺乏细微的常识推理。此外,这些模型的数据集的手动注释既昂贵又挑战,以适应新情况。视觉语言模型(VLM)的出现,由于其先进的视觉和因果推理技能,引入了这些问题的有希望的替代方案。据我们所知,这项研究是第一个在自主驱动的行人行为预测的概述中对VLM进行定量和定性评估的研究。 我们在公开可用的Pedes-Trian数据集上评估GPT-4V(ISION):JAAD和Wideview。 我们的定量分析重点是GPT-4V预测当前和未来帧中行人行为的能力。 该模型以零拍的方式达到了57%的精度,尽管令人印象深刻,但仍落后于最新的域特异性模型(70%),以预测行人交叉行动。 定性,GPT-4V表现出令人印象深刻的处理和解释综合交通情况,区分各种脚步行为以及检测和分析组的能力。 但是,它面临着挑战,例如难以检测较小的脚步 - 评估行人与自我车辆之间的相对运动。据我们所知,这项研究是第一个在自主驱动的行人行为预测的概述中对VLM进行定量和定性评估的研究。我们在公开可用的Pedes-Trian数据集上评估GPT-4V(ISION):JAAD和Wideview。我们的定量分析重点是GPT-4V预测当前和未来帧中行人行为的能力。该模型以零拍的方式达到了57%的精度,尽管令人印象深刻,但仍落后于最新的域特异性模型(70%),以预测行人交叉行动。定性,GPT-4V表现出令人印象深刻的处理和解释综合交通情况,区分各种脚步行为以及检测和分析组的能力。但是,它面临着挑战,例如难以检测较小的脚步 - 评估行人与自我车辆之间的相对运动。

连贯的机器人行为和实施方案在人类机器人相互作用期间情绪感知和识别中的作用:实验研究
背景:作为我们日常生活中的同伴,社会机器人变得越来越重要。因此,人类希望使用应用于人类相互作用的相同的心理模型,包括使用相互作用的手势。研究工作已致力于了解用户的需求,并开发机器人的行为模型,这些模型可以感知用户状态并正确地计划反应。尽管做出了努力,但关于机器人体现和行为对情绪感知的影响的挑战仍然开放。目的:这项研究的目的是双重的。首先,它的目的是评估机器人的声音手势和体现在用户感知情绪(刺激愉悦),唤醒(唤起情绪强度)和优势(刺激施加的控制程度)方面的作用。第二,它旨在评估机器人通过使用3种监督的机器学习算法进行交互的正面,负面和中性情绪的准确性:支持向量机器,随机森林和K-Neareart邻居。方法:使用从标准化数据库中检索到的60张图像的集合,使用胡椒机器人来引起人类的3个情绪。特别是,用胡椒机器人进行了2种情感启发的实验条件:具有静态行为或用表达连贯(COH)同时行为的机器人。此外,为了评估机器人实施例的作用,通过要求参与者与PC相互作用,在图形界面显示相同的图像来进行第三个启发。要求每个参与者仅接受3个实验条件中的1个。结果:这项研究总共招募了60名参与者,每种实验条件共有20个参与者,共有3600个相互作用。当用与PC条件相对于PC条件的COH刺激的刺激性机器人时,结果显示出显着差异(P <.05),从而在机器人的非语言通信和实施方案的重要性上进行了差异。相对于PC的机器人(具有静态行为的COH和机器人)的启发获得了较高的价分数。为了识别情绪,最近的邻居分类器取得了最佳的准确性结果。特别是,与静态行为和PC诱导相比,COH模式达到了最高的准确性(0.97)(分别为0.88和0.94)。
战略计划人行横道分析演示
IMH 计划。MH ARPA-D 资金用于 MH 的计划描述了 IMH 计划及其一些优先事项。但是,除了 RSA 135F 中立法要求的内容之外,没有任何 IMH 计划。没有或没有提供任何计划来描述如何为 6 岁以下儿童创建途径、联系和服务。