XiaoMi-AI文件搜索系统
World File Search System伺服电机
映射和对象的自主漫游器...
在这个综合项目中,我们旨在增强建立在4轮底盘上的避难系统,利用Arduino,Raspberry Pi 3B,Tensorflow Lite和RP Lidar A1的组合。这些组件的集成创建了一个精致的机器人系统,能够智能决策,对象检测和连续的两维映射。使用伺服电动机的超声传感器进行了伺服电机的超声传感器,以实时检测机器人路径中的障碍物,这是基本的避免系统的基础避免系统。这个简单且具有成本效益的解决方案提供了导航的初始层,从而通过避免碰撞来确保机器人可以在动态环境中操纵。为了提升系统的功能,我们引入了Raspberry Pi 3B,作为操作的大脑。连接到USB摄像机,Raspberry Pi利用Python中的Tensorflow Lite库进行对象检测和识别。此添加使机器人能够在其周围环境中识别和分类对象,从而增强其根据视觉输入做出明智决策的能力。目标:
静态机电通用测试机 - BL金属
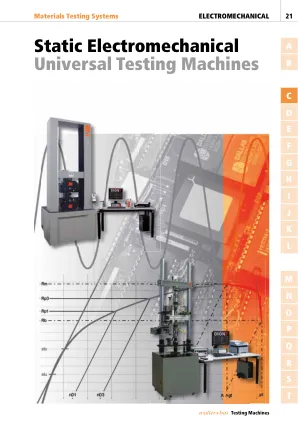
负载框架负载框架是刚性构造的,具有高轴向和侧向刚度。带有多个带有反射的无反弹球螺钉组件的线性模块,带有阳极氧化铝框架结合了高性能与合并尺寸。无反冲球螺钉组件提供高负载能力,高定位精度和可重复性。它不仅在张力或压缩方向上测试,而且还通过零测试进行测试。线性模块受到耐腐蚀的钢带的保护,这些钢带易于清洁并且在高温下也具有抗性。该机器配备了乘数极限探测器,以最佳保护操作,测试样品和机器。其他负载框架有两个,一个电子和质量超负荷保护。无反弹的线性模块由数字控制,由伺服电机控制,以使其更快地和停止,最佳控制和最高精度。可以在三个位置之间轻松更改十字头位置,以扩大可用的测试空间。这些紧凑型工作站提供了力,分离或变形闭环测试。它结合了高性能与合理尺寸。
文凭论文- 计算机图形学|维也纳工业大学
控制人形和类动物机器人仍然是一个重大挑战。机器学习方法已经在模拟中表现良好。但模拟与现实之间的差异有时使得很难在真实机器人上获得同样好的结果。此外,学习算法需要大量的训练数据。这项工作的目的是构建一个沙箱,使模拟机器人和真实机器人能够进行比较,并支持受控和连续收集模拟和真实数据。沙箱由动作捕捉组件和模拟组件组成。动作捕捉组件负责数据收集。为此,使用了带有六个高精度红外摄像机的 OptiTrack 系统。仿真组件使用Simulink和Simscape Multibody Library实现,负责仿真数据与真实数据的探索和比较。这项工作使用了 ROBOTIS 的四足机器人,由 15 个 Dynamixel 伺服电机控制。为了将机器人集成到沙箱中,必须对其控制器进行重新编程。这简化了向机器人传输运动数据的过程,并使得远程控制机器人成为可能。然后为机器人提供反光标记及其运动

3自由度 (DOF) 运动的设计和仿真...
2017 年 3 月 12 日接受,2017 年 3 月 16 日在线发布,特刊-7(2017 年 3 月)摘要 准备成功开发一个三自由度运动模拟平台,该平台能够模拟道路上的汽车行驶。开发运动模拟平台是为了实际模拟和测试无人驾驶道路车辆在道路上行驶的能力,然后在实际中演示。从概念设计到实际实施,考虑了运动模拟平台开发的所有方面。介绍了运动模拟平台的机械设计和构造,以及使该运动模拟平台运行的电子设备和软件。开发了过程和平台方向的数学模型。能够调节过程的控制器架构可成功控制运动模拟平台。Intelligent Motion Technology Pvt. 的实际运动模拟结果。Ltd,证明了运动模拟平台的成功。运动模拟平台的成功开发在很大程度上归功于对不同开发阶段的广泛研究、规划和评估。关键词:三自由度运动、运动模拟器、运动平台、倾斜传感器、无刷伺服电机。1.简介
节能气垫船的设计与分析
hayhan@yildiz.edu.tr 通讯作者的电子邮件 摘要 – 本研究讨论了电动气垫船的设计和分析,重点是安全性和可操作性。从计算流体动力学 (CFD) 分析开始,根据气垫船船身周围的空气阻力和流动轨迹确定气垫船的最佳节能形状。根据 CFD 分析结果,在 Solidworks 中开发了一个可行的 3D 模型。使用几个公式计算升力和推进电机所需的电机功率和特性,指定拟议小规模模型的系统拓扑和组件选择。除了 CFD 分析之外,还进行了机械分析以确保气垫船的各个部件能够承受作用在它们上的力,这些研究基于 Solidwork 的静态分析。各种电子元件、BLDC 电机、电机驱动器、伺服电机和传感器都连接到 Raspberry Pi (RPi),它作为气垫船的主控制器。本文全面概述了电动气垫船的设计和分析,包括关键部件的选择以及 CFD 和机械分析的结果,以确保气垫船的安全性和可操作性。本文讨论的方法可用于进一步研究气垫船的能源效率。关键词 - 气垫船、CFD、机械分析、能源效率、3D 设计

电气工程(Eleg)
Eleg 3348嵌入式微控制器3个学分的前提:Eleg 3348L,CPSC1131。先决条件:CPEG 2245。本课程涵盖了微控制器的体系结构,包括它们的内部构造方式以及它们与外部电路的接口方式。讨论了微控制器在复杂设备和简单设备中的应用。学生学习如何申请以及如何为给定应用程序选择微控制器。学生将学会为微控制器编程以发展编程技能。软件工具将用于为实用应用程序(例如伺服电机控制,传感器读取和数据显示)开发软件代码。随附的实验室课程涵盖了微处理器的编程,以执行特定的任务。随附的实验室课程涵盖了微处理器的编程,以执行特定的任务。本课程涵盖了PIC微控制器的编程和应用。学生能够使用汇编语言和软件工具(例如Mplab IDE和Multisim MCU)发展编程技能。这些工具用于开发用于实用应用的软件代码,例如电动机速度控制和电源的电压调节。研究生等效:ECEG 5348。以前EE 0346。
审查 Sun 的位置跟踪系统以提高...
摘要:本研究论文描述了有效的太阳位置跟踪系统,以从太阳辐射中提取最佳能量。如今,时代面临的最大问题是能源资源、其使用、化石燃料的限制。因此,为了满足我们的能源需求,我们唯一的选择就是利用可再生能源。有各种各样的能源,如风能、太阳能等。然而,太阳能是一种成本效益高、绿色的可再生能源。因此,研究人员对优化太阳能的最大功率表现出浓厚的兴趣。为了提高效率或从太阳中获取最大的能量,太阳能电池板总是垂直于太阳辐射的方向放置。最近几天,部署了先进微控制器智能嵌入式系统设计的片上资源,用于各种应用,特别是在工业、农业和家庭应用中。我们发现,该系统设计了先进的微控制器,如 AVR、PIC 微控制器。我们发现,为了跟踪太阳的位置,Arduino 最适合用于设计这种智能系统。设计了一个专用面板来跟踪基于伺服电机或步进电机的太阳位置。使用光电二极管模块识别太阳的位置。结果决定了轴的旋转方向是顺时针、逆时针还是垂直于太阳辐射。因此,本文旨在回顾太阳能跟踪系统的各种技术,以优化光伏太阳能电池板的能量。本文讨论了有关设计问题和结果的详细信息。

基于Arduino的智能汽车避免系统
自动驾驶汽车导航目前正在吸引大量的研究兴趣。设计基于Arduino的智能汽车避免系统的设计包括使用超声波传感器来检测障碍物并控制汽车的运动。该系统的设计和开发用于在自动遥控器中运行,以避免障碍和减少碰撞。本文使用Arduino微控制器和超声传感器介绍了智能汽车避免系统的原型开发。研究方法通过使用超声传感器来检测障碍物,发出声波并测量波动所花费的时间来运行。arduino微控制器充当系统的控制单元,可实时分析传感器数据并控制汽车的运动。arduino微控制器处理数据并计算障碍物的距离。根据计算的距离调整汽车的方向和速度,以避免碰撞。拟议的系统旨在提供一种具有成本效益,高效且可靠的避免障碍系统,该系统可用于各种应用,例如机器人技术和自动化车辆。系统的成功取决于传感器数据的准确性以及用于驱动汽车穿过环境的控制算法的有效性。总体而言,基于Arduino的智能汽车避免避免系统的设计是机器人技术的有趣且创新的应用。关键字:Arduino微控制器,超声传感器,伺服电机,机器人,避免障碍1.0简介

FLEXOP 演示飞机的地面测试
本文介绍了对 FLEXOP 演示飞机进行的地面测试活动。进行的测试分为结构、飞行系统和集成测试。除了描述测试设置和测试执行之外,还给出了主要发现和结论。结构测试包括静态、地面振动和适航性测试。静态和地面振动测试用于对制造的机翼和整个机身进行结构表征。本文还介绍了用于机翼形状和负载重建的光纤布拉格应变传感系统的评估和校准。适航性测试用于证明制造的机翼在指定极限载荷下的结构完整性。在飞行系统测试的背景下,简要介绍了机载自动驾驶仪硬件软件系统的主要组件,包括从 RC 发射器到飞机控制器的信号数据流、基线自动驾驶仪软件的功能以及与地面站的通信。所有这些组件都集成到硬件在环环境中,并简要介绍了伺服电机识别和硬件延迟测量。在设计基线和颤振控制器时考虑了测量的硬件延迟。在软件在环环境中,颤振控制器与基线控制器一起进行了测试。最后介绍系统集成测试。在此背景下,介绍了空气制动器、发动机、电子元件的兼容性、航程和滑行测试。
设计和实施17个DOF类人生物机器人以执行各种人类运动和监视
“为人类运动和监视的17 DOF类人生物机器人的设计和实施”项目引入了一个多功能的类人动物机器人,该机器人将娱乐和安全功能结合在一起。该创新的机器人配备了17度的自由度(DOF),为其提供了复制各种人类运动并用作监视工具的灵活性。机器人的硬件组件包括伺服电机,自定义机器人框架,Arduino微控制器,Nodemcu和ESP32CAM模块,用于监视功能。ESP32CAM允许实时视频流和监视。它旨在提高安全性,可以远程控制以帮助通过实时视频提要提供视觉反馈。机器人的附加功能是通过激活手电筒来照亮其周围环境,在弱光情况下提供帮助。在类似人类运动的领域,机器人能够复制各种行动,例如步行,挥舞等等。此功能提供了有趣的元素,并突出了机器人在交互式设置中的潜力。此外,包含一个被动红外(PIR)传感器允许机器人有效地检测人类的存在和运动。它可以通过传输警报,适合于家庭或办公室的监视或协助各种安全相关申请来响应人类活动。“ 17 DOF类人生物机器人的设计和实施