XiaoMi-AI文件搜索系统
World File Search System全向
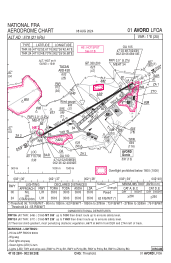
法国国家机场图表 01 AVORD LFOA 01 ...
- 对于非基础 ACFT 下降、爬升、进近 / 进近程序和在 AVORD 相关航空空域飞行的练习,必须获得 ESCA OPS 主管(862.702.6239 或 02.45.41.44.00 分机 26239)的批准,或在白天向值班军官(811.702.7136 或 02.34.34.71.36)批准。在这种情况下,PPR 进近 NR 必须写在 FPL 的第 18 个框中 - 全向 DEP 后,计划 MOTAL 或 LEMIN(FPL 路线文本字段的第一个点)。对于目的地为 LFOA 的 FPL,飞行员必须使用 MOTAL 或 LEMIN 完成 FPL 路线文本字段。

便携式电子设备 (PED) 航空规则制定委员会
2.背景。1966 年,美国联邦航空管理局 (FAA) 发布了 1 项法规,以解决飞机上使用便携式电子设备 (PED) 的问题。1958-1961 年的 PED 干扰研究得出结论,便携式调频 (FM) 无线电接收器会对导航系统(例如甚高频全向 (VOR) 导航系统)造成干扰,这促使制定了规则。规则制定的结论是,飞机操作员最适合确定哪些 PED 不会对其飞机上的导航或通信系统造成干扰。它进一步认识到,要求 FAA 对每种可能的 PED 进行或验证测试,以替代操作员做出的决定,是不切实际的,并且会给该机构带来过度和不必要的负担。
空间分组网络架构交易空间和潜在解决方案
用例属性 任务流量 消息延迟 用户带宽 通信模式 用户位置 可用性 战斗云 C2 非常低(<100 毫秒) 1-500 Kbps 单播 地面 持久 空间回程 TT&C 低(<5 秒) 1-500 Mbps 多播 LEO 按需 空中回程 交互式 高(10-50 秒) 1-3 Gbps Geocast MEO 预定地面回程 电话会议 无界 5-10 Gbps 发布/订阅 GEO 地面交换 流媒体 40+ Gbps 超越 GEO ISP 批量用户约束 用户链路客户端协议 TRANSEC 稳健性 连接性 网络规模 轨道 RF 定向 PPP/PPPoE LPI/LPD 战略连接 数十或更少 LEO RF 全向 SONET AJ 战术断开连接 数百 MEO 光定向 以太网 空间天气 数千 苔原 光漫射 IP 无界 GEO 量子链路 16 超越 GEO 其他 (MILCOM) 平台属性 有效载荷SWaP 功率 资产控制 内部链接 定制 低(150 千克) 低(150 瓦) 政府射频定向 COTS 中(500 千克) 中(1 千瓦) 商业射频全向 高 高(10 千瓦) 社区 光定向 量子 衍生网络属性 拓扑 功能 命名 路由 自治 内部协议 管理平面 调配时间 骨干 广播 固定 无 电路 NETCONF/YANG 分钟 尾部/边缘/存根 多播 预定 部分 SONET SNMP/MIB 小时 对等 固定(表格) 动态 完整 以太网 SDN 天 临时 IP 周

《国际民用航空公约》附件 10...
附件 10 第 I 卷是一份技术文件,其中规定了国际航空器运行所需的系统,这些系统为航空器在飞行的所有阶段提供无线电导航辅助设备。本卷的标准和建议措施 (SARP) 和指导材料列出了无线电导航辅助设备的基本参数规范,例如全球导航卫星系统 (GNSS)、仪表着陆系统 (ILS)、微波着陆系统 (MLS)、甚高频 (VHF) 全向无线电测距仪 (VOR)、无方向性无线电信标 (NDB) 和测距设备 (DME)。本卷中包含的信息包括功率要求、频率、调制、信号特性和监控等方面,以确保配备适当设备的航空器能够以所需的可靠性接收世界各地的导航信号。

Yamaha 01V96 宣传册 - 二手照明
后面板是平衡模拟立体声和监视器输出以及四个平衡“全向”输出的所在地。01V96 内置 ADAT 接口的光学 IN 和 OUT 连接器也位于后面板。还有带同轴连接器的数字 2 轨输入和输出。板载采样率转换允许 CD 播放器和其他连接到数字输入的数字源被监控或路由到输入通道,而无需与系统时钟同步。可通过字时钟输入和输出、MIDI 连接器和 USB“TO HOST”连接器提供一系列同步和控制选项,这些连接器可用于通过提供的 Studio Monitor 软件进行计算机控制。后面板还有一个扩展槽,可以接受各种 Yamaha mini-YGDAI 扩展卡,这些扩展卡可以添加多达 16 个各种格式的额外通道。

智能机器人的多模式融合和人机交互控制
方法:助行器为患者提供了弹药和指导力量的重量,以模仿一系列物理治疗师的运动,并创造自然,舒适且安全的环境。该系统由全向移动平台,BWS机制和骨盆支撑组成,以平滑骨盆的运动。使用人类意图,四个力传感器,两个操纵杆和一个深度感应摄像头来监视人机信息信息,并提出了一种多模式融合算法以提高精度。然后,系统分别通过相机,力传感器和操纵杆获得了标题E,骨盆姿势F和运动向量H,并通过特征提取和信息融合进行了对意图进行分类,并通过机器人的Kinematics通过机器人的Kinematics进行了最终输出运动速度。
现场试验报告室外 5G 独立网络使用...
5G 第五代移动网络 / 移动服务 5GC 5G 核心 AAU 有源天线单元 ASTRI 应用科技研究院 BBU 基带单元 CPE 客户端设备 EMBB 增强型移动宽带 EIRP 有效全向辐射功率 FDD 频分双工 HKSTP 香港科技园 ISAC 集成传感及通信 LOS 视距 MIMO 多输入多输出天线 mmWave 毫米波 NLOS 非视距 NSA 非独立 OFCA 通讯事务管理局 PDCP 分组数据汇聚协议 PHY 物理层 RBS 无线基站 RSRP 参考信号接收功率 RTT 往返时间 QAM 正交幅度调制 SA 独立 SINR 信号与干扰与噪声比 TDD 时分双工 UE 用户设备 URLLC 超可靠低延迟通信

面向 6G 的大规模 MIMO 技术趋势
摘要 — 在下一代无线系统和网络的曙光中,大规模多输入多输出 (MIMO) 已被设想为使能技术之一。随着在 5G 及更高版本的应用中不断取得成功,大规模 MIMO 技术已显示出其优越性、可集成性和可扩展性。此外,近年来,大规模 MIMO 的几种演进特征和革命性趋势逐渐显现,有望重塑未来的 6G 无线系统和网络。具体而言,未来大规模 MIMO 系统的功能和性能将通过结合其他创新技术、架构和策略来实现和增强,例如智能全向表面 (IOS)/智能反射面 (IRS)、人工智能 (AI)、THz 通信、无蜂窝架构。此外,基于大规模 MIMO 的更多不同的垂直应用将会出现并蓬勃发展,例如无线定位和传感、车载通信、非地面通信、遥感、行星间通信。

一个基于学习的控制的研究平台
摘要:我们介绍了伯克利人类人,这是一个可靠且低成本的中尺度类人动物研究平台,用于基于学习的控制。我们的轻巧,内置的机器人专为学习算法而设计,具有低相似复杂性,拟人化运动和针对跌倒的高可靠性。机器人的狭窄SIM到空隙间隙可以在室外环境中各个地形上敏捷和稳健的运动,并使用轻型域随机化实现了简单的强化学习控制器。此外,我们演示了数百米的机器人,在陡峭的未铺设的小径上行走,并用单腿和双腿跳跃,以证明其在Dynamical Walking中的高性能。能够具有全向运动并承受紧凑的设置,我们的系统旨在扩展基于学习的人形生物系统的可扩展,实现的实现。请查看我们的网站以获取更多详细信息。