机构名称:
¥ 1.0
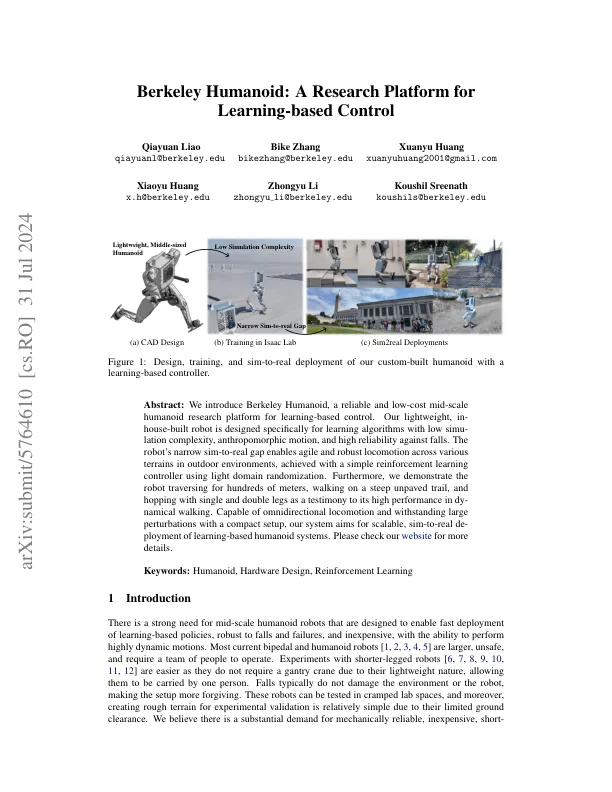
摘要:我们介绍了伯克利人类人,这是一个可靠且低成本的中尺度类人动物研究平台,用于基于学习的控制。我们的轻巧,内置的机器人专为学习算法而设计,具有低相似复杂性,拟人化运动和针对跌倒的高可靠性。机器人的狭窄SIM到空隙间隙可以在室外环境中各个地形上敏捷和稳健的运动,并使用轻型域随机化实现了简单的强化学习控制器。此外,我们演示了数百米的机器人,在陡峭的未铺设的小径上行走,并用单腿和双腿跳跃,以证明其在Dynamical Walking中的高性能。能够具有全向运动并承受紧凑的设置,我们的系统旨在扩展基于学习的人形生物系统的可扩展,实现的实现。请查看我们的网站以获取更多详细信息。
一个基于学习的控制的研究平台
主要关键词



相关文件推荐