机构名称:
¥ 1.0
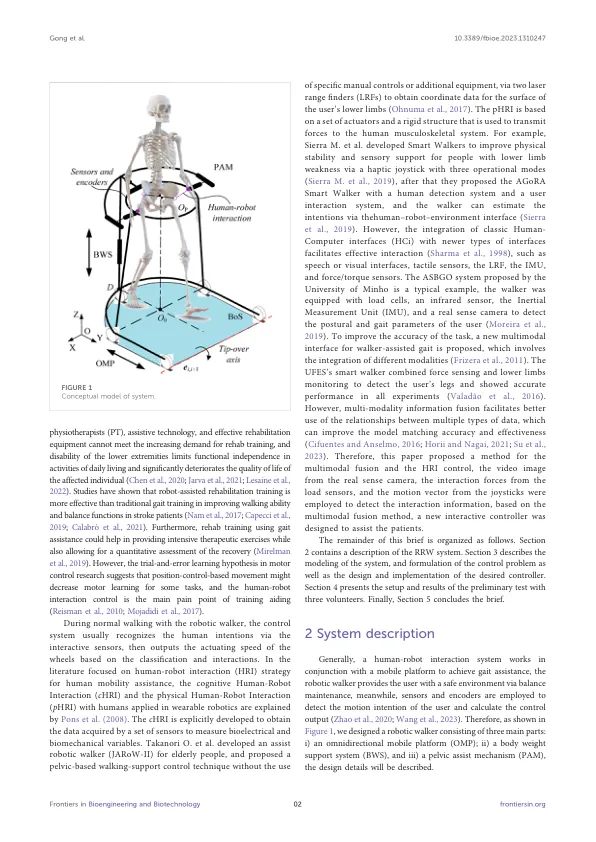
方法:助行器为患者提供了弹药和指导力量的重量,以模仿一系列物理治疗师的运动,并创造自然,舒适且安全的环境。该系统由全向移动平台,BWS机制和骨盆支撑组成,以平滑骨盆的运动。使用人类意图,四个力传感器,两个操纵杆和一个深度感应摄像头来监视人机信息信息,并提出了一种多模式融合算法以提高精度。然后,系统分别通过相机,力传感器和操纵杆获得了标题E,骨盆姿势F和运动向量H,并通过特征提取和信息融合进行了对意图进行分类,并通过机器人的Kinematics通过机器人的Kinematics进行了最终输出运动速度。
智能机器人的多模式融合和人机交互控制
主要关键词




相关文件推荐