XiaoMi-AI文件搜索系统
World File Search System动态
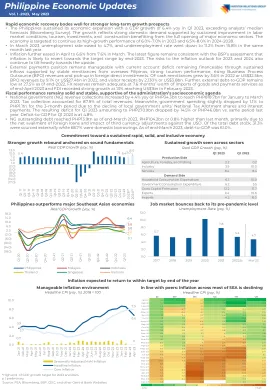
菲律宾经济动态
印度尼西亚 马来西亚 菲律宾 新加坡 泰国 越南 21年1月 1.6 -0.2 3.7 0.2 -0.3 -1.0 21年2月 1.4 0.1 4.2 0.7 -1.2 0.7 21年3月 1.4 1.7 4.1 1.3 -0.1 1.2 21年4月 1.4 4.7 4.1 2.1 3.4 2.7 21年5月 1.7 4.4 4.1 2.4 2.4 2.9 21年6月 1.3 3.4 3.7 2.4 1.3 2.4 21年7月 1.5 2.2 3.7 2.5 0.5 2.6 21年8月 1.6 2 4.4 2.4 0.0 2.8 21年9月 1.6 2.2 4.2 2.5 1.7 2.1 21年10月 1.7 2.9 4 3.2 2.4 1.8 21年11月 1.8 3.3 3.7 3.8 2.7 2.1 21年12月 1.9 3.2 3.1 4 2.2 1.8 22年1月 2.2 2.3 3 4 3.2 1.9 22年2月 2.1 2.2 3 4.3 5.3 1.4 22年3月 2.6 2.2 4 5.4 5.7 2.4 22年4月 3.5 2.3 4.9 5.4 4.7 2.6 22年5月 3.6 2.8 5.4 5.6 7.1 2.9 22年6月4.4 3.4 6.1 6.7 7.7 3.4 22年7月 4.9 4.4 6.4 7 7.6 3.1 22年8月 4.7 4.7 6.3 7.5 7.9 2.9 22年9月 6.0 4.5 6.9 7.5 6.4 3.9 22年10月 5.7 4 7.7 6.7 6.0 4.3 11月-22年 5.4 4 8 6.7 5.6 4.4 12月-22年 5.5 3.8 8.1 6.5 5.9 4.6 1月-23年 5.3 3.7 8.7 6.6 5.0 4.9 2月-23年 5.5 3.7 8.6 6.3 3.8 4.3 23年3月5.0 3.4 7.6 5.5 2.8 3.4 23年4月 4.3 6.6 2.7 2.8


乌干达经济动态
BoU 乌干达银行 CNOOC 中国海洋石油总公司 CDD 社区驱动发展 DAS 国内拖欠战略 DRC 刚果民主共和国 DRF 灾害风险融资 DSA 债务可持续性分析 EFU 能源、燃料和公用事业 EMDE 新兴市场和发展中经济体 GFN 总融资需求 GNI 国民总收入 HCI 人力资本指数 IC 信息和通信 ICT 信息通信和技术 LIPW 劳动密集型公共工程 MGLSD 性别、劳工和社会发展部 MoFPED 财政、计划和经济发展部 NDEF 国家干旱应急基金 NDP 国家发展计划 NSSF 国家社会保障基金 NPL 不良贷款 NDVI 归一化差异植被异常指数 NUSAF 北乌干达社会行动基金 NSNP 国家社会网络计划 OPEC 石油输出国组织

动态空间知识经济
人们长期以来一直认为城市可以推动经济增长。尽管如此,空间政策分析在很大程度上忽略了这些政策对增长的影响。在本文中,我开发了一个空间内生增长模型,其中异质性主体在生命周期内做出前瞻性的迁移决策和人力资本投资。人力资本投资技术中的局部外部性推动了集聚和增长。我表明,在平衡的增长路径上,增长率取决于人力资本的空间分布,使其对空间政策敏感。我根据美国大都市地区的数据校准了该模型,并表明它可以合理化大城市工人更快的工资增长,以及生命周期工资概况、迁移决策和城市特征中的其他关键模式。由于工人根据居住地以不同的速度积累人力资本,该模型提供了一个环境,在这个环境中,空间政策不仅可以吸引熟练工人,还可以培养他们。我发现,进一步将熟练工人集中在大城市的政策可以促进增长。

南非经济动态
简介:CareEdge 是一家知识型分析集团,提供信用评级、分析、咨询和可持续性服务。其母公司 CARE Ratings Ltd (CareEdge Ratings) 成立于 1993 年,是印度第二大评级机构,在对不同行业的公司进行评级方面拥有可靠的业绩记录,并在 BFSI 和 Infra 等高增长行业中占据领导地位。CareEdge Ratings 的全资子公司包括 (I) CARE Analytics & Advisory Private Ltd(以前称为 CARE Risk Solutions Pvt Ltd)、(II) CARE ESG Ratings Ltd(以前称为 CARE Advisory Research and Training Ltd)和 (III) CareEdge Global IFSC Ltd。CareEdge Ratings 的其他国际子公司包括毛里求斯的 CARE Ratings (Africa) Private Ltd、CARE Ratings South Africa (Pty) Ltd 和 CARE Ratings Nepal Ltd。
摩尔多瓦经济动态
执行摘要 俄罗斯入侵乌克兰后,摩尔多瓦的经济前景变得黯淡,预计只会逐步复苏。尽管经济在 2023 年恢复增长,但速度较慢,而且由于物价上涨,贫困率也随之上升。乌克兰战争、结构性问题和即将举行的选举等持续存在的挑战继续对消费者和投资者信心造成重大影响。确保能源资源的可用性和可负担性仍然是短期内的首要任务,因为它们可能对摩尔多瓦家庭(尤其是弱势群体)以及该国的竞争力和财政状况产生影响。尽管存在固有的结构性制约因素,但货币和财政政策似乎在刺激经济活动方面是一致的。财政政策面临着支持家庭实际可支配收入的双重挑战,同时为未来的增长奠定了基础。然而,有必要采取谨慎的态度来建立缓冲和管理财政风险。为了实现长期可持续发展并与欧盟人均收入水平保持一致,摩尔多瓦需要强劲的改革势头和对促进增长、气候适应型基础设施的投资。生产率增长缓慢、技能不匹配、治理缺陷和竞争有限等结构性挑战依然存在,因此必须进行改革以提高市场竞争力、消除采用先进技术的障碍并解决市场效率低下的问题。拟议的改革旨在加速基础设施的公共投资、实施多式联运战略以及实现能源部门多元化以减少对有限能源的依赖。加强 PPP 框架、加强采购战略和吸引私人投资对于部门发展至关重要。政策变化与体制改革相辅相成,包括让国有企业 (SOE) 受到私营公司监管以及促进竞争,对于刺激生产率增长和投资至关重要。利用欧盟一体化可以提高私营部门的生产力、增强竞争力并创造更多就业机会,从而使摩尔多瓦实现长期经济繁荣。优先准备可能获得的欧盟资金,特别是用于基础设施需求的资金,应成为未来的重点。