机构名称:
¥ 1.0
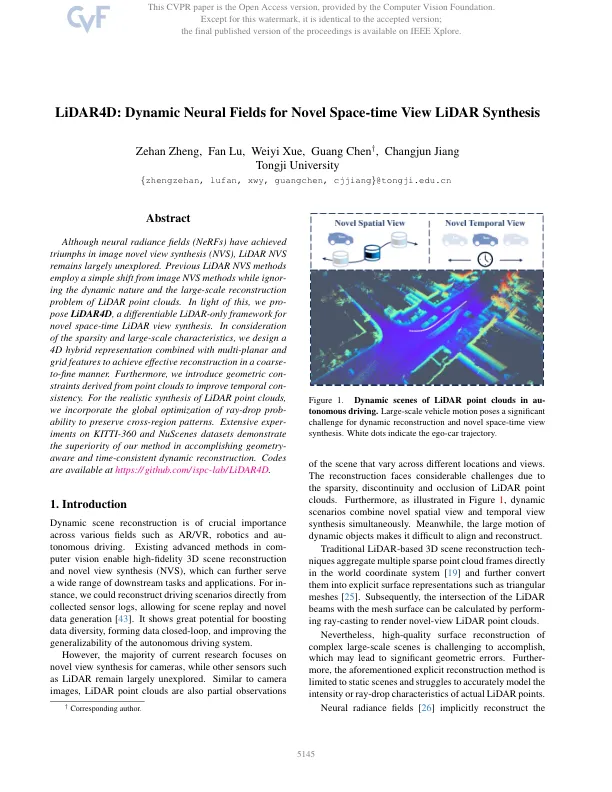
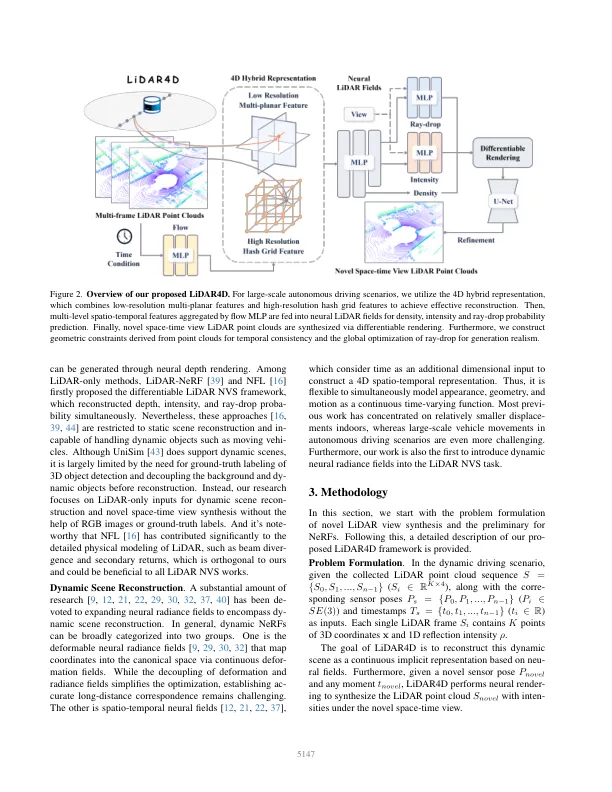
尽管神经辐射场 (NeRF) 在图像新视图合成 (NVS) 方面取得了成功,但 LiDAR NVS 仍然基本上未被探索。以前的 LiDAR NVS 方法采用了与图像 NVS 方法的简单转变,同时忽略了 LiDAR 点云的动态特性和大规模重建问题。鉴于此,我们提出了 LiDAR4D,这是一个可微分的 LiDAR 专用框架,用于新颖的时空 LiDAR 视图合成。考虑到稀疏性和大规模特性,我们设计了一种结合多平面和网格特征的 4D 混合表示,以由粗到细的方式实现有效重建。此外,我们引入了从点云衍生的几何约束来提高时间一致性。对于 LiDAR 点云的真实合成,我们结合了光线丢弃概率的全局优化来保留跨区域模式。在 KITTI-360 和 NuScenes 数据集上进行的大量实验证明了我们的方法在实现几何感知和时间一致的动态重建方面具有优越性。代码可在 https://github.com/ispc-lab/LiDAR4D 获得。
LiDAR4D:用于新型时空视图 LiDAR 合成的动态神经场
主要关键词



相关文件推荐