机构名称:
¥ 1.0
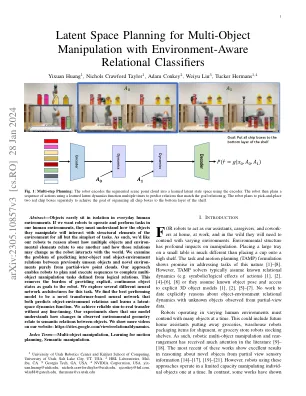
摘要 - 为了充分利用移动操纵机器人的功能,必须在大型未探索的环境中自主执行的长途任务。虽然大型语言模型(LLMS)已显示出关于任意任务的紧急推理技能,但现有的工作主要集中在探索的环境上,通常集中于孤立的导航或操纵任务。在这项工作中,我们提出了MOMA-LLM,这是一种新颖的方法,该方法将语言模型基于从开放式摄影场景图中得出的结构化表示形式,随着环境的探索而动态更新。我们将这些表示与以对象为中心的动作空间紧密地交织在一起。重要的是,我们证明了MOMA-LLM在大型现实室内环境中新型语义交互式搜索任务中的有效性。最终的方法是零拍摄,开放式摄影库,并且可以易于扩展到一系列移动操作和家用机器人任务。通过模拟和现实世界中的广泛实验,与传统的基线和最新方法相比,我们证明了搜索效率的显着提高。我们在http://moma-llm.cs.uni-freiburg.de上公开提供代码。
用移动操作的交互式对象搜索语言的动态场景图
主要关键词




相关文件推荐