机构名称:
¥ 1.0
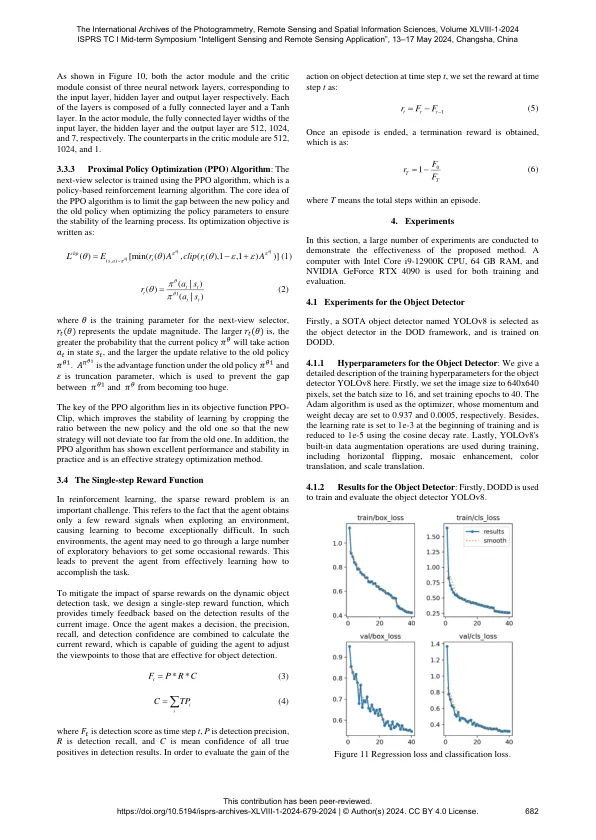
抽象对象检测是计算机视觉中广泛研究的任务。当前方法通常专注于从适当的观点捕获的图像。但是,从现实世界中的不同观点观察到的对象之间存在很大的差异。动态对象检测(DOD)方法会自动调整视觉场景中的相机视点,以依次查找最佳观点。当前,DOD任务通常被建模为顺序决策问题,并使用强化学习方法解决。现有方法面临稀疏奖励和训练不稳定的挑战。为了解决这些问题,我们分别提出了一个单步奖励功能和一个轻量级的网络。提供及时反馈的单步奖励功能为DOD任务提供了有效的培训过程。具有很少参数的轻量级网络可以确保训练过程的稳定性。为了评估我们方法的有效性,我们开发了一个基于UE4的仿真数据集,该数据集由1800个培训图像和450张测试图像组成。数据集包括五个对象类别:货车,汽车,拖车,盒子卡车和SUV。实验表明,我们的方法在模拟数据集上的表现优于SOTA对象检测器。具体而言,使用Yolov8对象检测器时,平均精度(AP)从89.1%提高到96.0%。
动态对象检测的视觉增强学习
主要关键词



相关文件推荐