XiaoMi-AI文件搜索系统
World File Search System助手


使用基于AI的虚拟助手:荟萃分析
零售商依靠虚拟助手(VAS),例如亚马逊的Alexa和聊天机器人,以低成本以及新颖的购物机会提供24/7的客户服务。尽管由于人工智能(AI)而证明了VA功能,但许多零售商仍然很难让客户成为VAS的重复用户。因此,为了建立有关如何促进VA使用的建议,此荟萃分析从244个与VAS交互的客户样本中提取了2,766个相关性。结果表明,客户,VA和购物场合相关的因素均影响了技术的使用。价格价值是最强的驱动力,其次是支持,社会影响和拟人化。的风险,能力和信任事项对较小的程度。这些因素通过触发两个客户的反应来发挥强烈的间接影响:认知和情感。负面情绪是一个特别重要的调解人。最后,几种VA类型增强或削弱了著名的效果,包括它们是否具有智能/智能,商业/非商业/非商业,基于语音/文本的效果,以及基于avatar-/non-non-avatar。结果表明,没有一种大小的方法适用于VAS,因为它们的性能随客户的响应而变化。当前的荟萃分析为寻求选择吸引人的VA的零售商提供了深入的指导。©2024作者。由Elsevier Inc.代表纽约大学出版。这是CC下的开放式访问文章(http://creativecommons.org/licenses/4.0/)

KPMG 人工智能代码助手
需要对基于 .NET/SQL 构建的 HR 遗留应用程序进行现代化改造。现代化改造的目标是将遗留应用程序过渡到 ServiceNow 平台,同时最大限度地减少开发时间、工作量和成本。通过与 KPMG 合作并利用 Code Assist 自动化功能,开发人员估计在 Code Assist 适用的领域中,开发工作量最多可减少 25-30%。该工具在创建工作流方面产生了约 10-20% 的开发工作量,在创建表和角色方面产生了 60-80% 的开发工作量。KPMG 实现了向 ServiceNow 的过渡,以消除技术债务、改善用户体验并提高开发速度效率。

苦味的苦味Sara Mascheretti博士助手...
可塑性(主任:M。Battaglia教授),意大利米兰的Vita-Salute San Raffaele大学。论文标题:“发育阅读障碍:预测的危险因素和候选基因在逐个环境的观点中的作用”(主管:M。Battaglia和C. Marino博士教授)2015:PSY.D。认知和行为心理疗法,米兰认证,意大利(意大利)许可证:2008:意大利伦巴第心的心理学家(N.03/12138)2012年的归纳:对行为遗传学协会的归纳于2015年的行为遗传学协会:意大利批准:认证和行为精神病学:ITIDICATION COMPITION COMPITION APPERIAN -2018:NOVEMBERS NOGEMBERS NOVEMBERS NOVEMBERS NOVEMBERS NOVEMBERS NOVEMBERS NOVEMBERS NOVEMBERS NOVEMBERS NOVEMBERS NOVEMBERS NOVEMBERS NOVEMBERS NOVEMBER一般心理学,心理生物学和心理学教授(Settore Concorsuale 11/E1 Psicologia Generale,Psicobiologia e Psicometia- psicometia-筋膜:II)进一步的研究培训:2007年:儿童精神病学部门C. Marino博士的志愿者研究助理(主要


pplus aav助手提高产量和质量海报
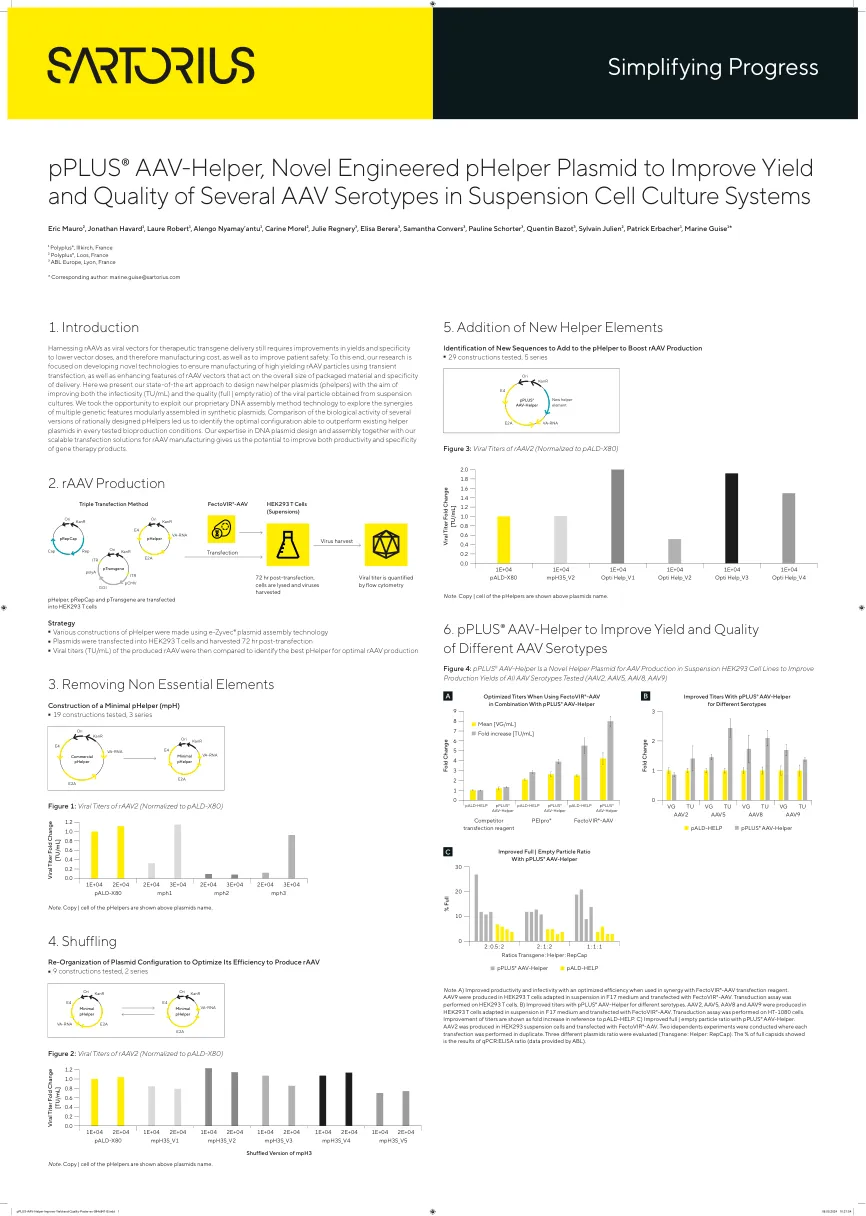
利用RAAV作为治疗转基因交付的病毒载体仍需要提高产量和特异性,以提高较低的矢量剂量,从而提高制造成本,并提高患者的安全性。为此,我们的研究重点是开发新型技术,以确保使用瞬态转染的高产RAAV颗粒制造,并增强RAAV矢量的特征,这些功能对包装材料的整体规模和交付的特异性作用。在这里,我们介绍了设计新的辅助质粒(Phelpers)的最先进方法,目的是提高从悬浮培养物获得的病毒粒子的感染率(TU/mL)和质量(完全|空比)。我们借此机会利用了我们的专有DNA组装方法技术,以探索在合成质粒中模块化组装的多种遗传特征的协同作用。比较几种版本的合理设计的Phelpers的生物学活性,这使我们确定了在每个经过测试的生物生产条件下都能超过现有的辅助质粒的最佳构型。我们在DNA质粒设计和组装方面的专业知识以及RAAV生产的可扩展转染解决方案使我们有可能提高基因治疗产品的生产率和特异性。

M.Sc. (营养和饮食学) 生物数据1。名称:Chandra Sekhar Dr. Rout 2。地址 curriculum vitae Manoj V. Mane博士(助手... b'' Pramoda Kumar Nayak(Bio-Data)
流行病学具有与人群中疾病发生有关的基本术语。二氧化碳。区分描述性流行病学和分析流行病学,并解释流行病学中疾病频率,疾病分布和疾病决定因素的含义。二氧化碳。了解流行病学方法,向量管理和不同的控制策略。了解不同食物传播感染和特定食物有毒物质的毒性作用。CO4。 定义健康教育并陈述健康教育的目标。 将公共卫生和社区健康教育干预措施应用于现实生活中。 CO 5。 了解初级卫生保健系统的功能以及在健康教育中使用视听辅助工具的重要性。 在使用大众媒体来传播健康意识并为此目的开发自己的视听辅助工具方面展示了广泛的技能。 二氧化碳。 了解在公共卫生及其任务领域工作的各种国家和国际组织。CO4。定义健康教育并陈述健康教育的目标。将公共卫生和社区健康教育干预措施应用于现实生活中。CO 5。了解初级卫生保健系统的功能以及在健康教育中使用视听辅助工具的重要性。在使用大众媒体来传播健康意识并为此目的开发自己的视听辅助工具方面展示了广泛的技能。二氧化碳。了解在公共卫生及其任务领域工作的各种国家和国际组织。

使用LLMS构建网络安全AI助手
问:什么是Kerberoasting攻击? A:对手可能会滥用有效的Kerberos票务票(TGT)或嗅探网络流量,以获取可能容易受到蛮力攻击的机票授予服务(TGS)票。 服务主名(SPN)用于唯一标识Windows服务的每个实例。 要启用身份验证,Kerberos要求SPN与至少一个服务登录帐户相关联(该帐户(专门负责运行服务的帐户)。具有有效Kerberos票务票证(TGT)的逆境者可能会请求一个或多个Kerberos门票票务服务(TGS)服务票证(TGS)服务票证票来自任何SPN。 这些票证的部分可以用RC4算法进行加密,这意味着与SPN相关的服务帐户的Kerberos 5 TGS-REP ETYPE 23哈希H被用作私钥,因此很容易受到脱机蛮力攻击的攻击,可能会揭示出明文的凭据。问:什么是Kerberoasting攻击?A:对手可能会滥用有效的Kerberos票务票(TGT)或嗅探网络流量,以获取可能容易受到蛮力攻击的机票授予服务(TGS)票。服务主名(SPN)用于唯一标识Windows服务的每个实例。要启用身份验证,Kerberos要求SPN与至少一个服务登录帐户相关联(该帐户(专门负责运行服务的帐户)。具有有效Kerberos票务票证(TGT)的逆境者可能会请求一个或多个Kerberos门票票务服务(TGS)服务票证(TGS)服务票证票来自任何SPN。这些票证的部分可以用RC4算法进行加密,这意味着与SPN相关的服务帐户的Kerberos 5 TGS-REP ETYPE 23哈希H被用作私钥,因此很容易受到脱机蛮力攻击的攻击,可能会揭示出明文的凭据。

比较基于规则和基于LLM的方法来启用主动机器人助手对话
[1] Michael Ahn,Anthony Brohan,Noah Brown等。2022。尽我所能,而不是我所说:机器人负担中的基础语言。Arxiv:2204.01691 [2] Christoph Bartneck,Elizabeth Croft和Dana Kulic。2009。拟人化,动画,可爱性,感知的智力和感知机器人安全性的测量工具。国际社会机器人学杂志1,1(2009),71-81。https://doi.org/10.1007/s12369-008-0001-3 [3] Deborah R. Billings,Kristin E. Schaefer,Jessie Y.C. Chen和Peter A. Hancock。 2012。 人类机器人互动:建立对机器人的信任。 in proc。 HRI。 ACM,109–110。 https://doi.org/10.1145/2157689.2157709 [4] Anthony Brohan,Noah Brown,Justice Carbajal,Yevgen Chebotar和evgen Chebotar和等。 2023。 RT-2:视觉语言行动模型将Web知识传递到机器人控制。 https://doi.org/10.48550/arxiv.2307.15818 arxiv:2307.15818 [CS] [5] John Brooke。 1995。 sus:快速而肮脏的可用性量表。 可用性评估。 ind。 189(1995)。 [6] L. Clark,N。Pantidi,O。Cooney,P。Doyle,D。Garaiallde,J。Edwards,B。Spillane,C。Murad,C。Munteanu,V。Wade和B. R. Cowan。 2019。 是什么使良好的交谈? 在设计真正的对话代理方面面临挑战。 in proc。 chi。 1–12。 https://doi.org/10.1145/3290605.3300705 [7] D. A. Dhinagaran,L。Martinengo,M。R. Ho,S。Joty,T。Kowatsch,R。Atun和L. T. Car。 2022。 2023。https://doi.org/10.1007/s12369-008-0001-3 [3] Deborah R. Billings,Kristin E. Schaefer,Jessie Y.C.Chen和Peter A. Hancock。2012。人类机器人互动:建立对机器人的信任。in proc。HRI。 ACM,109–110。 https://doi.org/10.1145/2157689.2157709 [4] Anthony Brohan,Noah Brown,Justice Carbajal,Yevgen Chebotar和evgen Chebotar和等。 2023。 RT-2:视觉语言行动模型将Web知识传递到机器人控制。 https://doi.org/10.48550/arxiv.2307.15818 arxiv:2307.15818 [CS] [5] John Brooke。 1995。 sus:快速而肮脏的可用性量表。 可用性评估。 ind。 189(1995)。 [6] L. Clark,N。Pantidi,O。Cooney,P。Doyle,D。Garaiallde,J。Edwards,B。Spillane,C。Murad,C。Munteanu,V。Wade和B. R. Cowan。 2019。 是什么使良好的交谈? 在设计真正的对话代理方面面临挑战。 in proc。 chi。 1–12。 https://doi.org/10.1145/3290605.3300705 [7] D. A. Dhinagaran,L。Martinengo,M。R. Ho,S。Joty,T。Kowatsch,R。Atun和L. T. Car。 2022。 2023。HRI。ACM,109–110。 https://doi.org/10.1145/2157689.2157709 [4] Anthony Brohan,Noah Brown,Justice Carbajal,Yevgen Chebotar和evgen Chebotar和等。 2023。 RT-2:视觉语言行动模型将Web知识传递到机器人控制。 https://doi.org/10.48550/arxiv.2307.15818 arxiv:2307.15818 [CS] [5] John Brooke。 1995。 sus:快速而肮脏的可用性量表。 可用性评估。 ind。 189(1995)。 [6] L. Clark,N。Pantidi,O。Cooney,P。Doyle,D。Garaiallde,J。Edwards,B。Spillane,C。Murad,C。Munteanu,V。Wade和B. R. Cowan。 2019。 是什么使良好的交谈? 在设计真正的对话代理方面面临挑战。 in proc。 chi。 1–12。 https://doi.org/10.1145/3290605.3300705 [7] D. A. Dhinagaran,L。Martinengo,M。R. Ho,S。Joty,T。Kowatsch,R。Atun和L. T. Car。 2022。 2023。ACM,109–110。https://doi.org/10.1145/2157689.2157709 [4] Anthony Brohan,Noah Brown,Justice Carbajal,Yevgen Chebotar和evgen Chebotar和等。2023。RT-2:视觉语言行动模型将Web知识传递到机器人控制。 https://doi.org/10.48550/arxiv.2307.15818 arxiv:2307.15818 [CS] [5] John Brooke。 1995。 sus:快速而肮脏的可用性量表。 可用性评估。 ind。 189(1995)。 [6] L. Clark,N。Pantidi,O。Cooney,P。Doyle,D。Garaiallde,J。Edwards,B。Spillane,C。Murad,C。Munteanu,V。Wade和B. R. Cowan。 2019。 是什么使良好的交谈? 在设计真正的对话代理方面面临挑战。 in proc。 chi。 1–12。 https://doi.org/10.1145/3290605.3300705 [7] D. A. Dhinagaran,L。Martinengo,M。R. Ho,S。Joty,T。Kowatsch,R。Atun和L. T. Car。 2022。 2023。RT-2:视觉语言行动模型将Web知识传递到机器人控制。https://doi.org/10.48550/arxiv.2307.15818 arxiv:2307.15818 [CS] [5] John Brooke。 1995。 sus:快速而肮脏的可用性量表。 可用性评估。 ind。 189(1995)。 [6] L. Clark,N。Pantidi,O。Cooney,P。Doyle,D。Garaiallde,J。Edwards,B。Spillane,C。Murad,C。Munteanu,V。Wade和B. R. Cowan。 2019。 是什么使良好的交谈? 在设计真正的对话代理方面面临挑战。 in proc。 chi。 1–12。 https://doi.org/10.1145/3290605.3300705 [7] D. A. Dhinagaran,L。Martinengo,M。R. Ho,S。Joty,T。Kowatsch,R。Atun和L. T. Car。 2022。 2023。https://doi.org/10.48550/arxiv.2307.15818 arxiv:2307.15818 [CS] [5] John Brooke。1995。sus:快速而肮脏的可用性量表。可用性评估。ind。189(1995)。 [6] L. Clark,N。Pantidi,O。Cooney,P。Doyle,D。Garaiallde,J。Edwards,B。Spillane,C。Murad,C。Munteanu,V。Wade和B. R. Cowan。 2019。 是什么使良好的交谈? 在设计真正的对话代理方面面临挑战。 in proc。 chi。 1–12。 https://doi.org/10.1145/3290605.3300705 [7] D. A. Dhinagaran,L。Martinengo,M。R. Ho,S。Joty,T。Kowatsch,R。Atun和L. T. Car。 2022。 2023。189(1995)。[6] L. Clark,N。Pantidi,O。Cooney,P。Doyle,D。Garaiallde,J。Edwards,B。Spillane,C。Murad,C。Munteanu,V。Wade和B. R. Cowan。2019。是什么使良好的交谈?在设计真正的对话代理方面面临挑战。in proc。chi。1–12。https://doi.org/10.1145/3290605.3300705 [7] D. A. Dhinagaran,L。Martinengo,M。R. Ho,S。Joty,T。Kowatsch,R。Atun和L. T. Car。2022。2023。设计,开发,评估和实施一个基于规则的对话代理(Discover):开发概念框架。MHealth和UHealth(2022)。[8] Satyam Dwivedi,Sanjukta Ghosh和Shivam Dwivedi。使用及时的工程和内在的学习来打破偏见:LLMS中的性别公平。Rupkatha人文跨学科研究期刊15,4(2023)。https://doi.org/10.21659/rupkatha.v15n4.10 [9] Gabriel Haas,Michael Rietzler,Matt Jones和Enrico Rukzio。2022。保持简短:语音助手的响应行为的比较。在2022 CHI人为因素会议论文集(CHI '22)中。计算机协会,美国纽约,美国,第321条,第12页。https://doi.org/10.1145/3491102.3517684 [10] Guy Hoffman和Wendy Ju。2014。设计机器人时要牢记运动。人类机器人相互作用杂志3,1(2014),91-122。[11] Trung Dong Huynh,William Seymour,Luc Moreau和Jose这样。2023。为什么会话助手仍然是黑匣子?透明度的情况。in proc。cui。ACM,1-5。 https://doi.org/10.1145/3571884.3604319 [12] Frank Joublin, Antonello Ceravola, Pavel Smirnov, Felix Ocker, Joerg Deigmoeller, Anna Belardinelli, Chao Wang, Stephan Hasler, Daniel Tanneberg, and Michael Gienger. 2023。 COPAL:具有大语言模型的机器人动作的纠正措施。 ARXIV预印型ARXIV:2310.07263(2023)。 2017。 2023。ACM,1-5。https://doi.org/10.1145/3571884.3604319 [12] Frank Joublin, Antonello Ceravola, Pavel Smirnov, Felix Ocker, Joerg Deigmoeller, Anna Belardinelli, Chao Wang, Stephan Hasler, Daniel Tanneberg, and Michael Gienger.2023。COPAL:具有大语言模型的机器人动作的纠正措施。ARXIV预印型ARXIV:2310.07263(2023)。2017。2023。[13] Kornelia Lazanyi和Beata Hajdu。信任人类机器人互动。在2017年IEEE第14届国际信息学科学会议。IEEE,216–220。 https://doi.org/10.1109/informatics.2017.8327249 [14] Jan Leusmann,Carl Oechsner,Johanna Prinz,Robin Welsch和Sven Mayer。 厨房对象的数据库:在人类机器人相互作用的背景下调查危险感知。 在Chi的扩展摘要中。 ACM,第6,9页。 https://doi.org/10.1145/3544549.3585884 [15] Jan Leusmann,Chao Wang,Michael Gienger,Albrecht Schmidt和Sven Mayer。 2023。 了解人类机器人相互作用的不确定性循环。 https://doi.org/10.48550/arxiv.2303.07889 arxiv:2303.07889 [CS.HC] [16] Jan Leusmann,Jannik Wiese,Jannik Wiese,Moritz Ziarko和Sven Mayer。 2023。 调查活跃智能助手的机会,以启动与用户互动的机会。 in proc。 妈妈。 ACM,495–498。 https://doi.org/10.1145/3626705.3631787 [17] Zeng,Zhengxiao du,Chenhui Zhang,Sheng Shen,Tianjun Zhang,Yu Su,Huan Sun,Minlie Huang,Yuxiao Dong和Jie Tang。 2023。 代理商:评估LLM作为代理。 arxiv:2308.03688 [CS.AI] [18] Amama Mahmood,Junxiang Wang,Bingsheng Yao,Dakuo Wang和Chien-Ming Huang。 2023。 LLM驱动的对话语音助手:交互模式,机会,挑战和设计指南。 2022。IEEE,216–220。https://doi.org/10.1109/informatics.2017.8327249 [14] Jan Leusmann,Carl Oechsner,Johanna Prinz,Robin Welsch和Sven Mayer。厨房对象的数据库:在人类机器人相互作用的背景下调查危险感知。在Chi的扩展摘要中。ACM,第6,9页。https://doi.org/10.1145/3544549.3585884 [15] Jan Leusmann,Chao Wang,Michael Gienger,Albrecht Schmidt和Sven Mayer。2023。了解人类机器人相互作用的不确定性循环。https://doi.org/10.48550/arxiv.2303.07889 arxiv:2303.07889 [CS.HC] [16] Jan Leusmann,Jannik Wiese,Jannik Wiese,Moritz Ziarko和Sven Mayer。2023。调查活跃智能助手的机会,以启动与用户互动的机会。in proc。妈妈。ACM,495–498。 https://doi.org/10.1145/3626705.3631787 [17] Zeng,Zhengxiao du,Chenhui Zhang,Sheng Shen,Tianjun Zhang,Yu Su,Huan Sun,Minlie Huang,Yuxiao Dong和Jie Tang。 2023。 代理商:评估LLM作为代理。 arxiv:2308.03688 [CS.AI] [18] Amama Mahmood,Junxiang Wang,Bingsheng Yao,Dakuo Wang和Chien-Ming Huang。 2023。 LLM驱动的对话语音助手:交互模式,机会,挑战和设计指南。 2022。ACM,495–498。https://doi.org/10.1145/3626705.3631787 [17] Zeng,Zhengxiao du,Chenhui Zhang,Sheng Shen,Tianjun Zhang,Yu Su,Huan Sun,Minlie Huang,Yuxiao Dong和Jie Tang。2023。代理商:评估LLM作为代理。arxiv:2308.03688 [CS.AI] [18] Amama Mahmood,Junxiang Wang,Bingsheng Yao,Dakuo Wang和Chien-Ming Huang。2023。LLM驱动的对话语音助手:交互模式,机会,挑战和设计指南。2022。arxiv:2309.13879 [CS] http://arxiv.org/abs/2309.13879 [19] Marco Manca,Parvaneh Parvin,FabioPaternò和Carmen Santoro。[n。 d。]。将Alexa集成到基于规则的个性化平台中。in proc。。ACM,108–113。 https://doi.org/10.1145/3411170.3411228 [20] Emily Mower,David J. Feil-Seifer,Maja J. Mataric和Shrikanth Narayanan。 [n。 d。]。 使用生理测量来研究人类机器人相互作用中用户状态估计的隐式提示。 Ro-Man。 IEEE,1125–1130。 https://doi.org/10.1109/roman.2007.4415249 [21] Carl Oechsner,Sven Mayer和Andreas Butz。 合作机器人作为烹饪设备的挑战和机遇。 in proc。 2022年与自动化互动的研讨会(AutomationXP22)。 https://sven-mayer.com/wp-content/uploads/2022/05/oechsner20222challenges.pdf [22] Matthew K.x.j. pan,Elizabeth A. Croft和GünterNiemeyer。 2018。 使用机器人社会属性量表(Rosas)评估对人向机器人移交的社会感知。 in proc。 HRI。 ACM,443–451。 https://doi.org/10.1145/3171221.3171257 [23] Tracy Sanders,Alexandra Kaplan,Ryan Koch,Michael Schwartz和P. A. Hancock。 2019。 信任与使用人物互动中的选择之间的关系。 人为因素61,4(2019),614–626。 2014。 方式和透明度对人类机器人相互作用的信任的影响。ACM,108–113。https://doi.org/10.1145/3411170.3411228 [20] Emily Mower,David J. Feil-Seifer,Maja J. Mataric和Shrikanth Narayanan。[n。 d。]。使用生理测量来研究人类机器人相互作用中用户状态估计的隐式提示。Ro-Man。 IEEE,1125–1130。 https://doi.org/10.1109/roman.2007.4415249 [21] Carl Oechsner,Sven Mayer和Andreas Butz。 合作机器人作为烹饪设备的挑战和机遇。 in proc。 2022年与自动化互动的研讨会(AutomationXP22)。 https://sven-mayer.com/wp-content/uploads/2022/05/oechsner20222challenges.pdf [22] Matthew K.x.j. pan,Elizabeth A. Croft和GünterNiemeyer。 2018。 使用机器人社会属性量表(Rosas)评估对人向机器人移交的社会感知。 in proc。 HRI。 ACM,443–451。 https://doi.org/10.1145/3171221.3171257 [23] Tracy Sanders,Alexandra Kaplan,Ryan Koch,Michael Schwartz和P. A. Hancock。 2019。 信任与使用人物互动中的选择之间的关系。 人为因素61,4(2019),614–626。 2014。 方式和透明度对人类机器人相互作用的信任的影响。Ro-Man。IEEE,1125–1130。 https://doi.org/10.1109/roman.2007.4415249 [21] Carl Oechsner,Sven Mayer和Andreas Butz。 合作机器人作为烹饪设备的挑战和机遇。 in proc。 2022年与自动化互动的研讨会(AutomationXP22)。 https://sven-mayer.com/wp-content/uploads/2022/05/oechsner20222challenges.pdf [22] Matthew K.x.j. pan,Elizabeth A. Croft和GünterNiemeyer。 2018。 使用机器人社会属性量表(Rosas)评估对人向机器人移交的社会感知。 in proc。 HRI。 ACM,443–451。 https://doi.org/10.1145/3171221.3171257 [23] Tracy Sanders,Alexandra Kaplan,Ryan Koch,Michael Schwartz和P. A. Hancock。 2019。 信任与使用人物互动中的选择之间的关系。 人为因素61,4(2019),614–626。 2014。 方式和透明度对人类机器人相互作用的信任的影响。IEEE,1125–1130。https://doi.org/10.1109/roman.2007.4415249 [21] Carl Oechsner,Sven Mayer和Andreas Butz。 合作机器人作为烹饪设备的挑战和机遇。 in proc。 2022年与自动化互动的研讨会(AutomationXP22)。 https://sven-mayer.com/wp-content/uploads/2022/05/oechsner20222challenges.pdf [22] Matthew K.x.j. pan,Elizabeth A. Croft和GünterNiemeyer。 2018。 使用机器人社会属性量表(Rosas)评估对人向机器人移交的社会感知。 in proc。 HRI。 ACM,443–451。 https://doi.org/10.1145/3171221.3171257 [23] Tracy Sanders,Alexandra Kaplan,Ryan Koch,Michael Schwartz和P. A. Hancock。 2019。 信任与使用人物互动中的选择之间的关系。 人为因素61,4(2019),614–626。 2014。 方式和透明度对人类机器人相互作用的信任的影响。https://doi.org/10.1109/roman.2007.4415249 [21] Carl Oechsner,Sven Mayer和Andreas Butz。合作机器人作为烹饪设备的挑战和机遇。in proc。2022年与自动化互动的研讨会(AutomationXP22)。https://sven-mayer.com/wp-content/uploads/2022/05/oechsner20222challenges.pdf [22] Matthew K.x.j. pan,Elizabeth A. Croft和GünterNiemeyer。 2018。 使用机器人社会属性量表(Rosas)评估对人向机器人移交的社会感知。 in proc。 HRI。 ACM,443–451。 https://doi.org/10.1145/3171221.3171257 [23] Tracy Sanders,Alexandra Kaplan,Ryan Koch,Michael Schwartz和P. A. Hancock。 2019。 信任与使用人物互动中的选择之间的关系。 人为因素61,4(2019),614–626。 2014。 方式和透明度对人类机器人相互作用的信任的影响。https://sven-mayer.com/wp-content/uploads/2022/05/oechsner20222challenges.pdf [22] Matthew K.x.j.pan,Elizabeth A. Croft和GünterNiemeyer。2018。使用机器人社会属性量表(Rosas)评估对人向机器人移交的社会感知。in proc。HRI。 ACM,443–451。 https://doi.org/10.1145/3171221.3171257 [23] Tracy Sanders,Alexandra Kaplan,Ryan Koch,Michael Schwartz和P. A. Hancock。 2019。 信任与使用人物互动中的选择之间的关系。 人为因素61,4(2019),614–626。 2014。 方式和透明度对人类机器人相互作用的信任的影响。HRI。ACM,443–451。 https://doi.org/10.1145/3171221.3171257 [23] Tracy Sanders,Alexandra Kaplan,Ryan Koch,Michael Schwartz和P. A. Hancock。 2019。 信任与使用人物互动中的选择之间的关系。 人为因素61,4(2019),614–626。 2014。 方式和透明度对人类机器人相互作用的信任的影响。ACM,443–451。https://doi.org/10.1145/3171221.3171257 [23] Tracy Sanders,Alexandra Kaplan,Ryan Koch,Michael Schwartz和P. A. Hancock。2019。信任与使用人物互动中的选择之间的关系。人为因素61,4(2019),614–626。2014。方式和透明度对人类机器人相互作用的信任的影响。https://doi.org/10.1177/00187208818816838 [24] Tracy L. Sanders,Tarita Wixon,K。Elizabeth Schafer,Jessie Y. C. C. C. Chen和P. A. Hancock。在cogsima中IEE,156–1 https://doi.org/10.1109/cogsima.2014.6816556 [25] Christian E. Schaefer。 [n。 D.] 在人类机器人互动中建立信任:“信任感知量表 - hri”的发展。 在强大的智能和对自治系统的信任中 https://doi.org/10.1007/978-1-4899-7668-0_10 [26] Kotaro Shukri,Ryyoma Ishigaki,Jundai Suzuki,Jundai Suzuki,Tsubasa,Tsubasa,Tsubasa,Takakubo,Kawakubo,Maski Shuzo,Maaski Shuzo,Maedaa。 2023。 使用大语言模型的对话系统的元控制。 (2023)。 https://doi.org/10.4850/arxiv.2312.2312.13715 [27] Jagdish Singh,Minnu Helen Joesph和Khurshid Begum Abdul Abdul Jabbar。 2019。 基于规则的Chabot供学生查询。 物理学杂志:会议系列1228,1(2019),012060。https://doi.org/10.10.1088/1742-6596/1228/1IEE,156–1https://doi.org/10.1109/cogsima.2014.6816556 [25] Christian E. Schaefer。 [n。 D.] 在人类机器人互动中建立信任:“信任感知量表 - hri”的发展。 在强大的智能和对自治系统的信任中 https://doi.org/10.1007/978-1-4899-7668-0_10 [26] Kotaro Shukri,Ryyoma Ishigaki,Jundai Suzuki,Jundai Suzuki,Tsubasa,Tsubasa,Tsubasa,Takakubo,Kawakubo,Maski Shuzo,Maaski Shuzo,Maedaa。 2023。 使用大语言模型的对话系统的元控制。 (2023)。 https://doi.org/10.4850/arxiv.2312.2312.13715 [27] Jagdish Singh,Minnu Helen Joesph和Khurshid Begum Abdul Abdul Jabbar。 2019。 基于规则的Chabot供学生查询。 物理学杂志:会议系列1228,1(2019),012060。https://doi.org/10.10.1088/1742-6596/1228/1https://doi.org/10.1109/cogsima.2014.6816556 [25] Christian E. Schaefer。[n。 D.]在人类机器人互动中建立信任:“信任感知量表 - hri”的发展。在强大的智能和对自治系统的信任中https://doi.org/10.1007/978-1-4899-7668-0_10 [26] Kotaro Shukri,Ryyoma Ishigaki,Jundai Suzuki,Jundai Suzuki,Tsubasa,Tsubasa,Tsubasa,Takakubo,Kawakubo,Maski Shuzo,Maaski Shuzo,Maedaa。 2023。 使用大语言模型的对话系统的元控制。 (2023)。 https://doi.org/10.4850/arxiv.2312.2312.13715 [27] Jagdish Singh,Minnu Helen Joesph和Khurshid Begum Abdul Abdul Jabbar。 2019。 基于规则的Chabot供学生查询。 物理学杂志:会议系列1228,1(2019),012060。https://doi.org/10.10.1088/1742-6596/1228/1https://doi.org/10.1007/978-1-4899-7668-0_10 [26] Kotaro Shukri,Ryyoma Ishigaki,Jundai Suzuki,Jundai Suzuki,Tsubasa,Tsubasa,Tsubasa,Takakubo,Kawakubo,Maski Shuzo,Maaski Shuzo,Maedaa。 2023。 使用大语言模型的对话系统的元控制。 (2023)。 https://doi.org/10.4850/arxiv.2312.2312.13715 [27] Jagdish Singh,Minnu Helen Joesph和Khurshid Begum Abdul Abdul Jabbar。 2019。 基于规则的Chabot供学生查询。 物理学杂志:会议系列1228,1(2019),012060。https://doi.org/10.10.1088/1742-6596/1228/1https://doi.org/10.1007/978-1-4899-7668-0_10 [26] Kotaro Shukri,Ryyoma Ishigaki,Jundai Suzuki,Jundai Suzuki,Tsubasa,Tsubasa,Tsubasa,Takakubo,Kawakubo,Maski Shuzo,Maaski Shuzo,Maedaa。2023。使用大语言模型的对话系统的元控制。(2023)。https://doi.org/10.4850/arxiv.2312.2312.13715 [27] Jagdish Singh,Minnu Helen Joesph和Khurshid Begum Abdul Abdul Jabbar。2019。基于规则的Chabot供学生查询。物理学杂志:会议系列1228,1(2019),012060。https://doi.org/10.10.1088/1742-6596/1228/1