XiaoMi-AI文件搜索系统
World File Search System器人

可植入的心脏扭曲器解纤器(ICD)
版权所有©2014年,科罗拉多大学的摄政员代表其员工:Daniel D Matlock MD MPH;丹尼·维吉尔(Danny Vigil);艾米·詹金斯MS;卡伦·梅利斯(Karen Mellis); Paul Varosy MD;弗雷德·马苏迪(Fred Masoudi)医学博士,MSPH; Angela Brega博士;大卫·马吉德(David Magid)医学博士,美国国立衰老研究所(K23AG040696)和以患者为中心的结果研究所(PI000116-01)的MPH资助。利益冲突:所有开发人员 - 无。上次更新08/13/2024。保留一些权利。未经出版商的明确书面许可,本出版物的任何商业开发或努力都不得使用。 未经出版商的许可并提供其确认的任何衍生作品,本出版物的任何部分都不得使用。 科罗拉多大学违反了与本文提供的信息的使用或采用相关的所有责任。 用户应对依赖此信息造成的任何损害负责。 内容仅是作者的责任,不一定代表资金机构(NIH,PCORI)或医疗中心的官方观点。 此信息图上提供的材料仅用于信息目的,并且不作为医疗建议提供。 任何人都应在确定ICD是否适合他或她的情况下咨询自己的医生。 这项工作是根据创意共享归因,非商业,无衍生物4.0国际许可证获得许可的。未经出版商的明确书面许可,本出版物的任何商业开发或努力都不得使用。未经出版商的许可并提供其确认的任何衍生作品,本出版物的任何部分都不得使用。科罗拉多大学违反了与本文提供的信息的使用或采用相关的所有责任。用户应对依赖此信息造成的任何损害负责。内容仅是作者的责任,不一定代表资金机构(NIH,PCORI)或医疗中心的官方观点。此信息图上提供的材料仅用于信息目的,并且不作为医疗建议提供。任何人都应在确定ICD是否适合他或她的情况下咨询自己的医生。这项工作是根据创意共享归因,非商业,无衍生物4.0国际许可证获得许可的。
使用人工智能(AI)编程的医疗设备
1. Hagiwara, H.、Yamashita, Y.、Yagi, S. 等人。经鼻内镜在多中心个体胃癌筛查中的现状及准确性。 J Cancer Screening 2009;47:683-92。2. Menon S、Trudgill N。内镜检查漏诊上消化道癌的可能性有多大?一项荟萃分析。Endosc Int Open 2014;2:E46-50。3. Kumar S、Thosani N、Ladabaum U 等人。3 分钟与 6 分钟结肠镜检查停药时间相关的腺瘤漏诊率:一项前瞻性随机试验。Gastrointest Endosc 2017;85:1273-80。4. Robertson DJ、Lieberman DA、Winawer SJ 等人。结肠镜检查后不久发现的结直肠癌:一项汇总多队列分析。Gut 2014;63:949-56。5. Ladabaum U、Fioritto A、Mitani A 等人。社区实践中窄带图像老化的结肠息肉实时光学活检尚未达到临床决策的关键阈值。胃肠病学 2013;144:81-91。6. 下一代医疗器械评估指标公布(药品上市通知第 0523-2 号,2019 年 5 月 23 日)。 7.《关于修订《药品、医疗器械等质量、功效和安全保障法》的法案》(2019年第63号法案)。 8. 有关程序对医疗器械的适用性的基本原则(2014年11月14日役所官发第1114-5号) 9. Takemura Y, Yoshida S, Tanaka S 等. 定量分析及开发计算机辅助系统以识别结直肠病变的规则小凹模式. Gastrointest Endosc 2010;72:1047-51. 10. Kominami Y, Yoshida S, Tanaka S 等. 利用实时图像识别系统和窄带成像放大结肠镜对结直肠息肉组织学进行计算机辅助诊断. Gastrointest Endosc 2015;83:643-9. 11. Byrne MF, Chapados N, Soudan F 等. 利用深部增强扫描对标准结肠镜检查未改变的视频进行分析以实时区分腺瘤性和增生性小结直肠息肉

国防部标准 NDS Y 7101C 轻武器弹药测试枪械
说明··········································································································································································································· 59

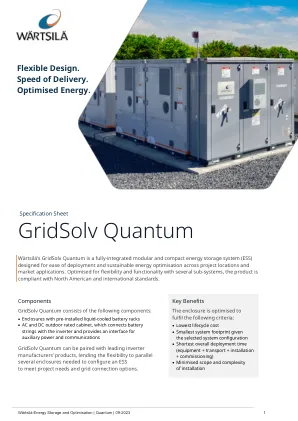
Viper 内存加载器/验证器 (MLV) 和 Viper MLV II
Viper MLV / MLV II 在严苛的航线环境中拥有 20 年的可靠性和耐用性。BAE Systems 不断开发和集成新功能,以支持 F-16 的所有 Block/版本,包括新型 F-16V 和 Block 70 F-16。Viper MLV / MLV II 支持 100 多个 F-16 航空电子系统,为整个 FMS 和美国空军 F-16 用户社区提供功能更新,而开发成本仅为独立系统的一小部分。我们通过识别复杂需求和开发独特的软件和硬件解决方案来满足客户需求。新型 Viper MLV II 提供网络强化硬件架构,确保长期的 F-16 航空电子设备支持。

ECL 15B驱动的堆叠器ECL 15B驱动的堆叠器
电池深部排放保护设备,电压放电指示器,具有低压自动切割和效力功能,可用于更高的电池寿命。证明的紧急开关和电压放电指示器,使其更耐用和可靠。指示器通过CAN-BUS显示故障,无需删除指示外壳。
我的物资追踪器 - GCSS-Army
1.输入材料编号:无通配符 (*) 2.输入 LIN:全部大写,无通配符 (*) 3.输入材料描述:全部大写,建议在输入的文本前后使用通配符 (*)。例如,*TANK* 4.输入 ACOM:全部大写,可选的辅助排序标准 5.输入工厂:(2000 或 2001) 6.输入城市:全部大写,可选的辅助排序标准 7.输入州:两个字符的缩写。全部大写,可选的次要排序标准 8。输入供应类别:单个数字,可选的次要排序标准 9。如果不确定输入 4、5、6、7 的可选搜索标准的正确方法,请在此处输入并单击 ,此搜索功能将创建正确格式的匹配列表 10。单击按钮呈现报告

可持续性追踪器 .xlsx
18/05/2023 LP - 建议将当前投资节约资本预算的一半(即 480 万英镑中的 240 万英镑)用于资助减少二氧化碳的计划,并将资金分配给每英镑 I2S 预算中二氧化碳排放量减少量最高的计划,直至资金用完。计划的提议者仍然可以寻求其他资金来增加每英镑的二氧化碳排放量,从而使项目在名单上名列前茅。[请注意,如果有合适的可持续性更新,可以将其添加到政策委员会,也可以将其与预算分开推进]。财务部门就绿色债券咨询了我们的财务管理经纪人。他们的建议是,理事会能够以低于提供的绿色债券的利率获得贷款。因此,可持续项目将根据回报率进行评估。 CL 03/23 - 目前已与绿色金融研究所和其他地方当局进行了磋商,并确认了使用气候债券的可行性,可使当地社区投资当地项目,同时降低理事会应付的利率。


分支机构和QUBO求解器
在两个实际应用程序中,在两个方面(例如项目和用户,项目和市场)之间的匹配是必不可少的任务。双方图匹配已被研究为模拟这两个方面之间的这种匹配的基本问题[1]。通常应用了两分匹配的加权变体,以从相关的权重和在两部分图上定义的某些全局目标函数方面找到最佳的匹配。个体权重可以代表各种指标,例如价格,距离,时间和概率。匹配的现实世界应用包括儿童与学校之间的匹配[2,3],资源分配[4,5]和运输[6,7]。在另一类设置中,可以在某些概率语义上定义边缘的权重以表示直觉现象[8]。从与匹配有关的优化观点,尤其是在运输方面,使用模糊逻辑进行直觉现象的其他相关研究可以在库马尔[9,10]中找到。以前,已经研究了参与者(例如平台/服务提供商和个人用户)所需的几个全球属性,以进行双分部分匹配。一个例子是考虑与所陈述的偏好稳定匹配(例如,关于另一侧的项目的偏好)[11]。代表首选项的其他示例包括使用排名的元素列表来表示偏好和使用实用程序值来量化偏好(例如[12--14])。