机构名称:
¥ 1.0
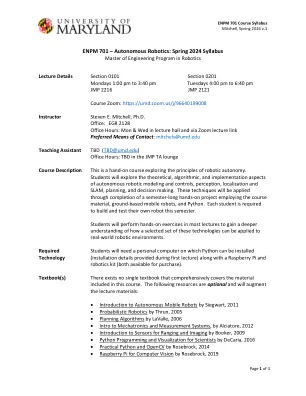
概述:构成机器人规划,州估计和控制的基础的算法简介。主题包括优化,运动计划,不确定性表示,卡尔曼和粒子过滤器以及点云处理。作业专注于编程机器人在模拟中执行任务。
算法机器人技术简介秋季2024年教学大纲
主要关键词
相关文件推荐