XiaoMi-AI文件搜索系统
World File Search System四轴

2024-2025-四轴飞行器挑战赛- ...
美国宇航局康涅狄格州太空资助联盟 (CTSGC) 是 52 个州立、大学主导的太空资助联盟之一,由美国宇航局 STEM 参与办公室 (OSTEM) 资助。美国宇航局 CTSGC 总部位于哈特福德大学,在康涅狄格州有 24 所附属高等教育机构。该联盟旨在制定和实施学生奖学金和奖学金计划、跨学科太空相关研究基础设施、教育和公共服务计划;以及与行业、研究实验室以及州、地方和其他政府的合作计划。太空资助是 NASA 利益的交汇点,通过与任务理事会和 NASA CTSG 的利益保持一致来实施。尽管它主要是高等教育计划,但太空资助计划应涵盖整个教育渠道,包括小学/中学和非正规教育。美国宇航局 CTSGC 是一个能力增强联盟。

4DOF 四轴飞行器:开发、建模和...
本文介绍了具有四个自由度 (4DOF) 的四轴飞行器原型的开发,该原型允许飞行器绕三个轴(偏航、俯仰和滚转)旋转以及沿 z 轴(高度)的位移。目标是获得使用商用四轴飞行器中最多组件(传感器和执行器)的工作台原型,并使用 PID、LQR 和滑模技术将其用于姿态和高度应用。从系统建模开始,展示其规格、使用的组件,最后以控制器的开发、仿真和应用结束。
![[四价]流行性感冒疫苗注射同意书四价同意书...](/simg/7\782fffc86c5663639f8d2a0ed8134ca322176e5a.webp)
[四价]流行性感冒疫苗注射同意书四价同意书...
§ 流感疫苗有效期一年, 每年需接种一次。凡9 岁以下从未接种过流感疫苗的儿童, 均须接种两剂流感疫苗, 而两剂疫苗的接种时间须至少相隔四个星期§ 不宜接种流感疫苗人士:对鸡蛋丶新霉素(Neomycin) 丶庆大霉素(Gentamycin) 或流感疫苗有过敏反应的人士;在注射当日身体不适或发烧的人士都不宜接种。 § 曾对鸡蛋有严重过敏反应的人士, 应由专业医护人员在能识别及处理严重敏感反应的适当医疗场所内接种。流感疫苗内虽含有卵清蛋白(即鸡蛋白质) , 但疫苗制造过程经过反覆纯化, 卵清蛋白的含量极少, 即使对鸡蛋敏感的人士, 在一般情况下亦能安全接种。 § 流感疫苗十分安全,除了接种部位可能会出现痛楚、红肿外,一般并无其他副作用。部分人士在接种后6 至12 小时内可能会出现发烧、肌肉疼痛,以及疲倦等症状,这些症状通常会在两天内减退。如持续发烧或不适,请咨询医生意见。若出现罕见的风疹块、 口舌肿胀、手脚麻痹、无力及呼吸困难等不良反应,患者必须立即求医。 § The vaccine is effective for 1 year; you should take the influenza vaccine annually. Children under 9 years old who have never received any influenza vaccine are recommended to have 2 doses of influenza vaccine with a minimum interval of 4 weeks § People who are allergic to eggs, Neomycin, Gentamycin or flu vaccine; and/or people who have fever should not take influenza vaccine 。 § Individuals with a history of anaphylaxis to eggs should have seasonal influenza vaccine administered by health care professionals in appropriate medical facilities with capacity to recognize and manage severe allergic reactions. Influenza vaccine contains ovalbumin (a chicken protein), but the vaccine manufacturing process involves repeated purification and the ovalbumin content is very little. Even people who are allergic to eggs are generally safe to receive vaccination 。 § Inactivated influenza vaccine is very safe and usually well tolerated, apart from occasional soreness, redness or swelling at the vaccination site. Some people may experience fever, muscle pain, and tiredness beginning 6 to 12 hours after vaccination. These usually improve in two days. If fever or discomfort persists, please consult a doctor. Severe allergic reactions like hives, swelling of the lips or tongue, and difficulties in breathing, or serious adverse events such as limb numbness or weakness are rare but require emergency consultation.
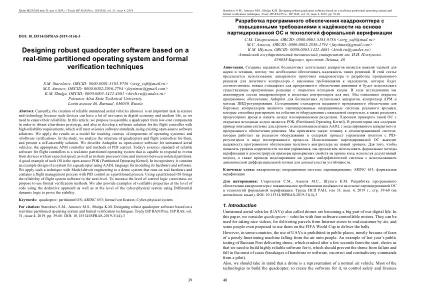
基于实时设计稳健的四轴飞行器软件...
摘要。目前,制造可靠的无人机(无人机)是科学和技术的一项重要任务,因为此类设备在数字经济和现代生活中有很多用例,所以我们需要确保它们的可靠性。在本文中,我们建议用低成本组件组装四轴飞行器以获得硬件原型,并使用现有的开源软件解决方案开发具有高可靠性要求的飞行控制器软件解决方案,该解决方案将满足航空电子软件标准。我们将结果用作教学课程“操作系统组件”和“软件验证”的模型。在研究中,我们分析了四轴飞行器及其飞行控制器的结构,并提出了一种自组装解决方案。我们将 Ardupilot 描述为无人机的开源软件、适当的 APM 控制器和 PID 控制方法。当今航空电子飞行控制器可靠软件的标准是实时分区操作系统,该系统能够以预期的速度响应来自设备的事件,并在隔离分区之间共享处理器时间和内存。此类操作系统的一个很好的例子是开源 POK(分区操作内核)。在其存储库中,它包含一个四轴飞行器系统的示例设计,使用 AADL 语言对其硬件和软件进行建模。我们将这种技术与模型驱动工程应用于在真实硬件上运行的演示系统,该系统包含一个以 PID 控制作为分区过程的飞行管理过程。使用分区操作系统将飞行系统软件的可靠性提升到了一个新的水平。为了提高控制逻辑的正确性,我们建议使用形式验证方法。我们还提供了使用演绎方法在代码级别以及使用微分动态逻辑在信息物理系统级别验证属性的示例,以证明稳定性。

四轴飞行器经典控制器设计与分析
摘要:本文旨在介绍四轴飞行器的设计、仿真和控制,以无人机 (UAV) 为例。为了实现这一目标,我们开发了四轴飞行器的数学模型。在 MATLAB/Simulink 环境中开发了模型仿真和控制器设计。尽管它仍然是一个完整的非线性系统,但本文采用了四轴飞行器的数学表示和目标系统的建模。对所获得的数学模型进行了线性化。为了设计姿态控制器,使用系统识别技术获得了负责四轴飞行器运动的无刷直流电机 (BLDCM) 的传递函数。本文描述了一个完整的测试实验以实现这一目标。对设计的控制器进行了评估,并讨论了仿真结果。关键词:无刷直流电机 (BLDCM)、无人机 (UAV)、电子速度控制 (ESC)。1. 简介四轴飞行器无人机已被证明可用于许多军事和民用应用。最重要的特点是垂直起降 (VTOL) 和悬停能力,因此它适合于执行诸如监视、道路交通监控、自然灾害后的受害者定位等任务。此类飞行器也引起了学术研究机构越来越多的兴趣,因为它们可以用作机器人研究的低成本试验台 [1] , [2], [3]。为了让 au
基于实时设计强大的四轴飞行器软件...
摘要。目前,制造可靠的无人机是科学技术领域的一项重要任务,因为此类设备在数字经济和现代生活中有很多用途,因此我们需要确保其可靠性。在本文中,我们建议用低成本组件组装四轴飞行器以获得硬件原型,并使用现有的开源软件解决方案开发具有高可靠性要求的飞行控制器软件解决方案,该解决方案将满足航空电子软件标准。我们将结果用作教学课程“操作系统组件”和“软件验证”的模型。在研究中,我们分析了四轴飞行器及其飞行控制器的结构,并提出了一种自组装解决方案。我们将 Ardupilot 描述为无人机的开源软件、适当的 APM 控制器和 PID 控制方法。当今航空电子飞行控制器可靠软件的标准是实时分区操作系统,该系统能够以预期的速度响应来自设备的事件,并在隔离分区之间共享处理器时间和内存。开源 POK(分区操作内核)就是这种操作系统的一个很好的例子。在其存储库中,它包含一个四轴飞行器系统的示例设计,使用 AADL 语言对其硬件和软件进行建模。我们将这种技术与模型驱动工程应用于在真实硬件上运行的演示系统,该系统包含一个以 PID 控制作为分区过程的飞行管理过程。使用分区操作系统将飞行系统软件的可靠性提升到了一个新的水平。为了提高控制逻辑的正确性,我们建议使用形式化验证方法。我们还使用演绎方法在代码级别提供可验证属性的示例,并使用差分动态逻辑在信息物理系统级别提供可验证属性的示例,以证明稳定性。
基于实时设计强大的四轴飞行器软件...
摘要。目前,制造可靠的无人机(无人机)是科学和技术的一项重要任务,因为此类设备在数字经济和现代生活中有很多用例,所以我们需要确保它们的可靠性。在本文中,我们建议用低成本组件组装四轴飞行器以获得硬件原型,并使用现有的开源软件解决方案开发具有高可靠性要求的飞行控制器软件解决方案,该解决方案将满足航空电子软件标准。我们将结果用作教学课程“操作系统组件”和“软件验证”的模型。在研究中,我们分析了四轴飞行器及其飞行控制器的结构,并提出了一种自组装解决方案。我们将 Ardupilot 描述为无人机的开源软件、适当的 APM 控制器和 PID 控制方法。当今航空电子飞行控制器可靠软件的标准是实时分区操作系统,该系统能够以预期的速度响应来自设备的事件,并在隔离分区之间共享处理器时间和内存。此类操作系统的一个很好的例子是开源 POK(分区操作内核)。在其存储库中,它包含一个四轴飞行器系统的示例设计,使用 AADL 语言对其硬件和软件进行建模。我们将这种技术与模型驱动工程应用于在真实硬件上运行的演示系统,该系统包含一个以 PID 控制作为分区过程的飞行管理过程。使用分区操作系统将飞行系统软件的可靠性提升到了一个新的水平。为了提高控制逻辑的正确性,我们建议使用形式验证方法。我们还提供了使用演绎方法在代码级别以及使用微分动态逻辑在信息物理系统级别验证属性的示例,以证明稳定性。
基于实时设计强大的四轴飞行器软件...
摘要。目前,制造可靠的无人机是科学技术领域的一项重要任务,因为此类设备在数字经济和现代生活中有很多用途,因此我们需要确保其可靠性。在本文中,我们建议用低成本组件组装四轴飞行器以获得硬件原型,并使用现有的开源软件解决方案开发具有高可靠性要求的飞行控制器软件解决方案,该解决方案将满足航空电子软件标准。我们将结果用作教学课程“操作系统组件”和“软件验证”的模型。在研究中,我们分析了四轴飞行器及其飞行控制器的结构,并提出了一种自组装解决方案。我们将 Ardupilot 描述为无人机的开源软件、适当的 APM 控制器和 PID 控制方法。当今航空电子飞行控制器可靠软件的标准是实时分区操作系统,该系统能够以预期的速度响应来自设备的事件,并在隔离分区之间共享处理器时间和内存。开源 POK(分区操作内核)就是这种操作系统的一个很好的例子。在其存储库中,它包含一个四轴飞行器系统的示例设计,使用 AADL 语言对其硬件和软件进行建模。我们将这种技术与模型驱动工程应用于在真实硬件上运行的演示系统,该系统包含一个以 PID 控制作为分区过程的飞行管理过程。使用分区操作系统将飞行系统软件的可靠性提升到了一个新的水平。为了提高控制逻辑的正确性,我们建议使用形式化验证方法。我们还使用演绎方法在代码级别提供可验证属性的示例,并使用差分动态逻辑在信息物理系统级别提供可验证属性的示例,以证明稳定性。
4DOF 四轴飞行器:开发、建模和控制
本文介绍了四轴飞行器原型的发展,包括四自由度 (4DOF),也有可能在龙卷风中旋转(偏航、俯仰和滚转)或长时间旋转 z(高度)。目标是使用商业四轴飞行器(传感器和参与者)的主要量化组件,并使用 PID、LQR 和滑模技术来控制高度和高度的应用。系统模型部分,大多数是特定的信息、使用的组件和最终的控制者、模拟和应用程序。
基于实时设计强大的四轴飞行器软件...
摘要。目前,制造可靠的无人机是科学技术领域的一项重要任务,因为此类设备在数字经济和现代生活中有很多用途,因此我们需要确保其可靠性。在本文中,我们建议用低成本组件组装四轴飞行器以获得硬件原型,并使用现有的开源软件解决方案开发具有高可靠性要求的飞行控制器软件解决方案,该解决方案将满足航空电子软件标准。我们将结果用作教学课程“操作系统组件”和“软件验证”的模型。在研究中,我们分析了四轴飞行器及其飞行控制器的结构,并提出了一种自组装解决方案。我们将 Ardupilot 描述为无人机的开源软件、适当的 APM 控制器和 PID 控制方法。当今航空电子飞行控制器可靠软件的标准是实时分区操作系统,该系统能够以预期的速度响应来自设备的事件,并在隔离分区之间共享处理器时间和内存。开源 POK(分区操作内核)就是这种操作系统的一个很好的例子。在其存储库中,它包含一个四轴飞行器系统的示例设计,使用 AADL 语言对其硬件和软件进行建模。我们将这种技术与模型驱动工程应用于在真实硬件上运行的演示系统,该系统包含一个以 PID 控制作为分区过程的飞行管理过程。使用分区操作系统将飞行系统软件的可靠性提升到了一个新的水平。为了提高控制逻辑的正确性,我们建议使用形式化验证方法。我们还使用演绎方法在代码级别提供可验证属性的示例,并使用差分动态逻辑在信息物理系统级别提供可验证属性的示例,以证明稳定性。