XiaoMi-AI文件搜索系统
World File Search System四轴

使用临时...自动协调四轴飞行器机队
摘要:在本论文中,我们研究了一组四旋翼飞行器的分散控制器的设计。四旋翼飞行器分为领导者和跟随者。领导者由人控制,而追随者则使用去中心化控制器来跟随领导者。追随者是自主的,不知道领导者的行为。本论文的新颖之处在于依靠 WiFi 模块等廉价传感器来估计与相邻四旋翼飞行器的距离。为了设计去中心化控制器,迭代学习与监督学习和模仿学习相结合,经历了几个阶段,包括日志收集、高级模型训练和设计“一个控制器”。然后控制器被集成到跟踪器中,使它们成为自治的。学习方法的主要优点是移动

商用 SUAS 四轴飞行器在 MOS 中的集成......
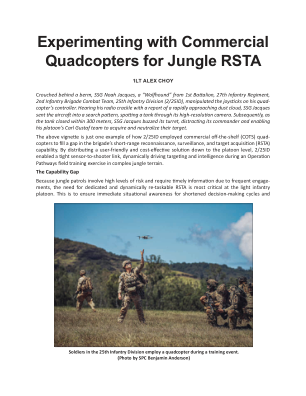
俄乌战争清楚地表明了小型无人机系统(SUAS)在现代和未来战场上的重要性。随着美国陆军从欧洲冲突中吸取教训,并将自身重点转向为大规模作战行动(LSCO)做准备,各级部队的 SUAS 整合成为首要训练重点。尽管美国陆军率先使用 SUAS 系统,但我们未能像俄罗斯和乌克兰武装部队那样快速地大规模部署和实施该技术。如果不在战术层面获取和训练相关平台,我们就无法实现战略和战役层面对 SUAS 整合的高度重视和需求。一支普通骑兵部队通常拥有一两架“渡鸦”(无人机)和几架“黑黄蜂”(无人机)。这些数量不足,需要补救。

2025-01-前所未有的人肢虚拟四轴飞行器。......
这项研究是 BrainGate2 临床试验的一部分,重点研究如何将这些神经信号与机器学习相结合,为患有神经损伤或疾病的人提供外部设备控制的新选择。这位参与者于 2016 年开始与斯坦福大学的研究团队合作,几年后,脊髓损伤导致他无法使用手臂或腿。他有兴趣为这项工作做出贡献,并且对飞行特别感兴趣。
通过设计第三种方法实现四轴飞行器的轨迹跟踪控制...
[1] L. Derafa、L. Fridman、A. Benallegue 和 A. Ouldali,“四旋翼直升机姿态跟踪问题的超扭转控制算法”,载于《可变结构系统 (VSS)》,2010 年第 11 届国际研讨会,2010 年,第 62-67 页。[在线]。可访问:http://ieeexplore.ieee.org /stamp/stamp.jsp?arnumber=5544726 [2] A. Rabhi、M. Chadli 和 C. Pegard,“四旋翼飞行器的鲁棒模糊控制稳定”,载于《先进机器人技术 (ICAR)》,2011 年第 15 届国际会议,2011 年,第471-475 页。[在线]。可访问:http://ieeexplore .ieee.org =6088629 / stamp/ stamp。JSP?ar 编号 [3] H. Khebbache、B. Sait、F. Yacef 和 Y. Soukkou,“在执行器故障情况下对四旋翼飞行器进行稳健稳定”,《国际信息技术、控制和自动化杂志》,第 2 卷,第 2 期。2,2012 年,第 1-13 页。[4] P. Johan From、J. Tommy Gravdahl、K. Ytterstad Pettersen,《车辆操纵器系统》,Verlag,伦敦:Springler,2014 年。[5] Atheer L. Salih、M. Moghavvemi、Haider A. F. Mohamed、Khalaf Sallom Gaeid,《四旋翼无人机的建模和 PID 控制器设计》,IEEE,2010 年。[6] D. Lee、H. Jin Kim 和 S. Sastry,“四旋翼直升机的反馈线性化与自适应滑模控制”,《国际控制自动化与系统杂志》,第 3 卷,第 1 期。7,页。页。419-428,2009 年。[7] O. Gherouat、D. Matouk、A. Hassam 和 F. Abdessemed,“四旋翼无人机的建模和滑模控制”,J.自动化与系统工程,卷。10,号。3,页。150-157,2016 年。[8] Abraham Villanueva、B. Castillo-Toledo 和 Eduardo Bayro-Corrochano,“四旋翼多模式飞行滑模控制系统”,2015 年国际无人机系统会议 (ICUAS),美国科罗拉多州丹佛市,2015 年 6 月。[9] 易奎、顾锋、杨丽英、何玉清、韩建达,“四旋翼吊挂系统滑模控制”,第 36 届中国控制会议论文集,中国大连,2017 年 7 月 26-28 日。[10] A. Benallegue、A. Mokhtari 和 L. Fridman, “四旋翼无人机的反馈线性化和高阶滑模观测器”,《VariableStructure Systems》,2006 年。VSS’06。国际研讨会,2006 年,第365–372。5887–[在线]。可访问:http://ieee xplore.ieee.org/stamp/stamp.jsp?arnumber=1644545 [11] T. Madani 和 A. Benallegue,“四旋翼无人机的滑模观测器和反步控制”,美国控制会议,2007 年。ACC ’07,2007 年,第
使用商用四轴飞行器进行丛林 RSTA 试验
在最坏的情况下,敌人在对四轴飞行器控制器的射频 (RF) 链路与信号情报 (SIGINT) 测向设备进行三角测量后,向排发出间接火力。为避免泄露机密和随后的利用,飞行员应在飞行操作期间通过在控制器和敌方传感器之间放置地形特征来实施地形遮蔽,以降低其射频信号。同样,飞行员可以尝试在会反射无线电波的地形附近飞行,并导致错误的方位角,从而产生敌方测向误差。例如,在印度尼西亚的丛林巡逻期间,排左右两侧较茂密的植被和陡坡有助于限制探测。但是,排领导在权衡沿着渠道地形移动的战术风险与敌方 SIGINT 威胁的可能性时,必须考虑现有的情报估计。

具有动态结构参数的滑臂四轴飞行器飞行控制
摘要 — 介绍了一种新型四轴飞行器的概念设计和飞行控制器。该设计能够在飞行过程中改变无人机的形状,以实现位置和姿态控制。我们考虑动态重心 ( CoG ),它会导致无人机的转动惯量 ( MoI ) 参数不断变化。这些动态结构参数在系统的稳定性和控制中起着至关重要的作用。四轴飞行器臂长是一个可变参数,它由基于姿态反馈的控制律驱动。MoI 参数是实时计算的,并纳入系统的运动方程中。无人机利用螺旋桨的角运动和可变的四轴飞行器臂长进行位置和导航控制。重心的运动空间是一个设计参数,它受执行器限制和系统稳定性要求的限制。提供了有关运动方程、飞行控制器设计和该系统可能应用的详细信息。此外,通过航路点导航任务和复杂轨迹跟踪的比较数值模拟对所提出的变形无人机系统进行了评估。

Flyables:使用四轴飞行器实现虚拟现实的触觉输入设备
虚拟现实 (VR) 已进入日常生活。虽然 VR 提供了越来越高的沉浸感,但控制和触觉仍然有限。当前的 VR 耳机配有专用控制器,用于控制每个虚拟界面元素。但是,控制器输入大多与虚拟界面不同。这降低了沉浸感。为了提供更逼真的输入,我们推出了 Flyables,这是一个使用四轴飞行器为虚拟用户界面元素提供匹配触觉的工具包。我们采用了五个常见的虚拟 UI 元素并构建了它们的物理对应物。我们将它们连接到四轴飞行器以提供按需触觉反馈。在一项用户研究中,我们将 Flyables 与基于控制器的 VR 输入进行了比较。虽然控制器在精度和任务完成时间方面仍然优于 Flyables,但我们发现 Flyables 提供了一种与 VR 环境交互的更自然、更有趣的方式。根据研究结果,我们概述了未来可以改善与 Flyables 交互的研究挑战。
附件四:人工智慧视觉技术学分学程...
课名课名课名建议修课顺序可用下列课程替代建议修课顺序机器学习建议修课顺序建议修课顺序建议修课顺序可用下列课程替代建议修课顺序1或2机器学习特论3人工智慧伦理、法律与社会1或2人工智慧伦理与人权1或2人工智慧伦理与人权33或4深度学习实验3或4深度学习实验3或4深度学习实验3或4深度学习实验3或4深度学习实验3或4影像处理概论3或4影像处理概论影像处理概论影像处理概论影像处理概论影像处理概论影像处理概论影像处理概论数位影像处理数位影像处理数位影像处理数位影像处理数位影像处理影像处理、电脑视觉及深度学习概论学习概论学习概论学习概论学习概论学习概论学习概论影像处理与机器人视觉影像处理与机器人视觉影像处理与机器人视觉影像处理与机器人视觉影像处理与机器人视觉计算机视觉理论电脑视觉实务与深度学习计算机视觉理论电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉与深度学习电脑视觉与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉实务与深度学习电脑视觉与深度学习电脑视觉与深度学习电脑视觉与深度学习电脑视觉与深度学习电脑视觉与深度学习电脑视觉与深度学习电脑视觉与深度学习高等电脑视觉高等电脑视觉电脑视觉与深度学习电脑视觉与深度学习3 3 3 3 3 3或4或4或4或4或4或4或5智慧医疗
基于四...
为了实现经济发展与环境利益之间的双赢局势,本文构建了一个四方进化游戏模型,包括政府,两个同质港口和基于进化游戏理论的运输公司。根据雅各比矩阵,通过计算四方的回报矩阵并复制动态方程,我们研究并讨论了五个不同情况下模型的可能稳定点。使用MATLAB模拟游戏,并选择相关参数进行灵敏度分析。结果表明,当政府不执行政策时,环境利益将最大化,并且港口和航运公司使用岸上电气系统(即稳定点E12(0,1,1,1,1))。同时,通过分析端口尺寸敏感性,当t = 1.116时,大规模的端口演化趋向于0,而小规模的端口则上下闪烁,从而得出这样的结论,即小规模的端口具有更大的潜力来实施岸上的负责人,并能够获得较快的福利效果。这项研究为实施岸上电气系统提供了理论支持,同时指出了政府在促进岸上电动机开发中的关键作用。它提供了参考,以有效促进在减少碳排放量的情况下使用岸上电动机的使用,这对于在小型端口中实施海岸电气尤其重要,并有助于最大程度地提高港口操作的环境利益。
1 轴和 2 轴磁传感器 - Farnell
OFFSET- (A) 1 OUT+ (A) 2 VBRIDGE (A) 3 OUT- (A) 4 OUT- (B) 5 VBRIDGE (B) 6 GND (A) 7 S/R+ (B) 8 5 S1 9.82 Tw�[(423.6.6.4 -1S)353B28.26R388 re�213[(423.6.6.4+M213.865 423.94-423.678 668Tj�Tj�01A213.13[(423.6.6.277194 l�4 43461.475 0 823 w 3465.4313- (13.174 -8 r313- 4213.174 7�0.475 0436.4b7 0.353 98. 0.6.6.465 70.384 -6947.696 1411.840558848 -4.60423 w0 01007 -6.73213.10 01007 -3.135.84 l�44�9.28.2.353�9.20.318 -3226 0 038e�B57 437.4918 479.5 A013 Tm�0.0001 0 98.2 S/R+ 0 9C�21 0.49480.86.4774914 429.2 419.6¥2.24 1845 1.694 43461.434 75323 w 3465.431e�f�113.174 -8 r31e�68613.174 7�0.434 7480.4b7 0.353 98.84 -1.4310.6.953B28.2684 - 1411.8484 8428.16.35 3 w0 492.431 -0(13.194 0.6.41 -0(13.f2 m�57�0 Tw�(�9.28.2.353�9.20.318 -3226 T�8030(157 437.4918 4 偏移+)Tj9.5 B2.24HMC1021S)Tj�/F6 1 �[(.656179 0 2 -3914 429.22 -1.4 TD�-0.16)-5f�98.0001 T�1.5825 �[(OUT- �)-5f�98.�0 T1.5825 �[(OUT-88 -1.4 TD�0.14)-5f�98.�0 �1.5825 �[(OUT-]TJ�-0.2217 13)-5f�97.0001 TB25 �[(OUT-]]TJ�-0.0288 -1.4 12)-5f�98.0TJ�1.5B25 �[(OUT- �)-5f�98.0001 T-1.5B25 �[(OUT-2 -1.4 TD�-0.10)-5f�98.0001 T�1.5B25 �[(OUT- 9)-11TJ�S)0(0 T1.5B25 �[(O/F3OUT+S)Tj�/97e�440�9.47493.6.94344712 81.2309 490TD�-0.000101 Tw�[(OFFSUT- (+)-643.9(1)]TJ�-1.806 -1.4 TD�0 Tc�[(VBR48.4)-643.9(6)]TJ�2.274 TD�01.4 TD7(VBRIDG (A))-643.8(7)]TJ�2)]TJ�2.2784BRIDG •2A))-644(1)�0 Tc0002 TwT*�[(OUT-5283ND)-644(3)]TJ�-0.2217 - OFFSE2 Tw�[(VBRIDG ©A))-644(1)]1 Tc�-02.2787(OFFSET- �A))-644(1)]TJ�.0002 Tw�[(S/R+ &.42.430 0 8.24.807�213.5-469. 0 058.430 0 8.20.423.13.5-469. 45 12.430 0 8.20.423.13.5-469.f&.42.4292010724.807�213.5-469. 0 058.4292010720.423.13.5-469. 45 12.4292010720.423.13.5-469.f&.42.420 023.4.807�213.5-469. 0 058.420 023.0.423.13.5-469. 45 12.420 023.0.423.13.5-469.f&.42.42 6611.24.807�213.5-469. 0 058.42 6611.20.423.13.5-469. 45 12.42 6611.20.423.13.5-469.f&.42.425 05A214.807�213.5-469. 0 058.425 05A210.423.13.5-469. 45 12.425 05A210.423.13.5-469.f&.42.424T- 414.807�213.5-469. 0 058.424T- 410.423.13.5-469. 45 12.424T- 410.423.13.5-469.f&.42.422�199.24.807�213.5-469. 0 058.422�199.20.423.13.5-469. 45 12.422�199.20.423.13.5-469.f&.42.42 Tc96214.807�213.5-469. 45 12.42 Tc96210.423.13.5-469. 0 058.42 Tc96210.423.13.5-469..845 1.694 -.449sc�05 -18�0.31e�6436m05 -1241820 0 8613.464 0.7820 069813.46-125.431e.6670.4b7 0.353 98496- 49431e.36353B24.4)-0 0 2-469。 96- 49420 013353B24.4) –469。 96- 49431e�59153B24.4) –469..845 1.694 9 0 36442 4 -926m09 0 38424T-8.23.468.288 24T-81423.463.68612 4 -A213.b7 0.353 98473.8634255 039 14 -1147.694-469.f�f�978425 081M2139C�.14252.901.519C�.10142560 8.23.f2 m�8.282T+S